PREAMBULE
Ce document se veut plus une
analyse de fonctionnement de la Canne de Combat q�une �tude purement sportive.
En effet la Canne de Combat associe une cin�matique
de mouvements complexes � des automatismes de fonctionnement tout
aussi �labor�s. Les imp�ratifs de la canne de combat sont au nombre de 3 :
La protection, l�attaque et la mobilit�s sont les 3 composantes universelles du
combattant. Reprenons ce d�coupage historique et d�codons les parades, les
attaques et les d�placements.
En voici un d�cryptage et
une grille de lecture, plus m�canicienne et automaticienne avec une question �
l�esprit �J�ai ma canne, je suis en garde, qu�est ce que je
fais avec mon adversaire qui est lui-m�me en garde ? �.
1/ LE
COMBAT DE CANNE EN 6 ATTAQUES �
OBJECTIF DU COMBAT :
� Toucher son
adversaire sans se faire toucher par lui �
D�finition
donn�e par Maurice Sarry dans son livre � La Canne, arme de d�fense,sport
de combat � page 25
� Toucher
l�adversaire plus souvent que lui-m�me ne nous touche �
D�finition
donn�e par Maurice Sarry dans son livre � La Canne, arme de d�fense,sport
de combat � page 82
Deux d�finitions
compl�mentaires pour un m�me jeu :
Le gagnant d�un combat de
canne est le canniste qui comptabilise le plus de touches. A cette notion
purement comptable, est associ�e la notion de mani�re de toucher
l�adversaire. En effet le combat ne se r�sume pas � une avalanche de coups, le
plus rapide � la r�p�tition du coup gagnerait la partie et aucun jeu fin ne
serait possible. Ainsi deux notions fondamentales viennent agr�menter la
qualit� du jeu, l��vitement et la parade de l�attaque adverse. Ces notions sont
communes aux autres arts martiaux. Le remplacement de la canne par un objet
moins sportif et plus ��martial�� donnerait tout son sens � ces deux notions de
pr�servation de l�int�grit� des partenaires.
COMMENT ATTEINDRE CET
OBJECTIF :
- avec des techniques
acquises + ses possibilit�s physiques personnelles + son � temp�rament �
(d�finition de Maurice
Sarry) � tout en �tant prot�g�
- avec des connaissances
tactiques
1.1/ LES TECHNIQUES ACQUISES
Le paragraphe 1.1 est inspir� d�un message post�
par Mr Philippe ROUDILLON sur le Forum Canne Fran�aise � UN APERCU DE LA TECHNIQUE DE LA CANNE.htm � (texte
en bleu du 02/02/2005).
1.1.1/ Le principe
fondamental de l�attaque : Plan Horizontal ou Plan Vertical ?
� Toutes les attaques - qu'elles soient verticales ou horizontales - doivent �tre ex�cut�s uniquement par d�veloppement complet du bras � (� La Canne, arme de d�fense, sport de combat � page
24). La canne doit �tre "lanc�e" afin de
d�crire une trajectoire la plus large possible pour obtenir une efficacit�
maximum due � l'amplitude du mouvement.
Un peu d�informations sur la Canne et sur
ses 6 attaques. Je vous
rappelle que derri�re tout coup de Canne il y a une technique de placement du
poids du corps tr�s importante et de ce fait � conna�tre
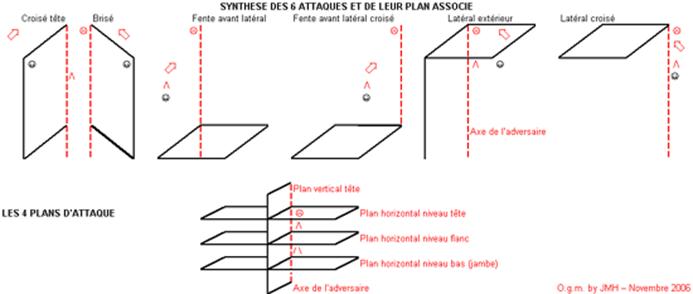
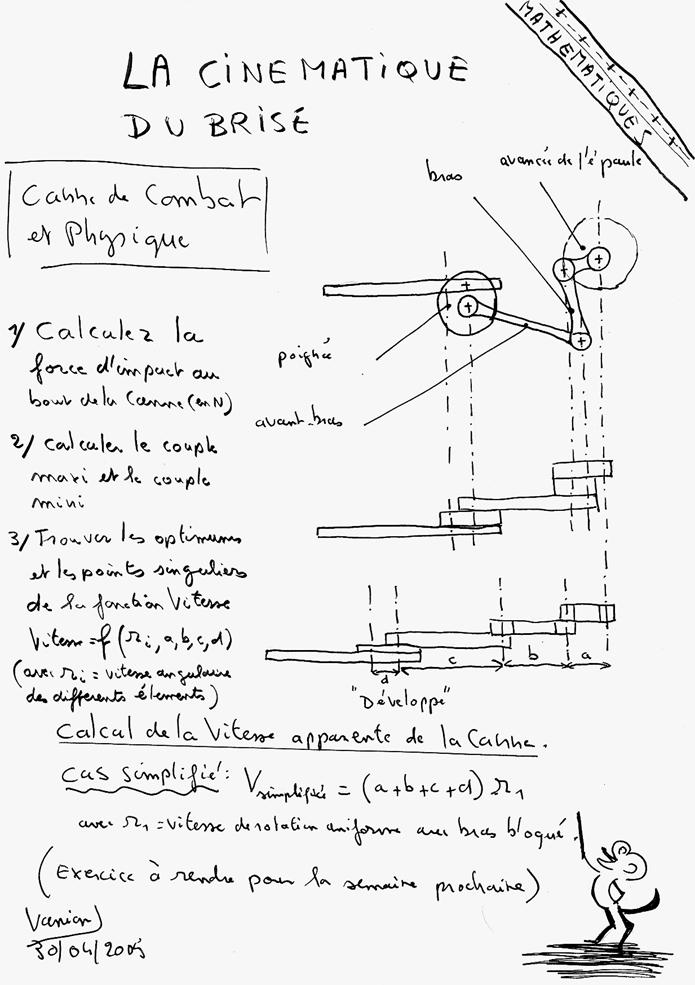
1.1.2/ Les 6 attaques de canne et
leur cin�matique
� Bris�.
Cin�matique
simplifi�e du mouvement de la canne : 1 rotation par rapport � un axe
horizontal + 1 deuxi�me rotation par rapport � un axe horizontal + 1 translation rectiligne en direction de
l�adversaire. La canne �volue dans un plan vertical passant par l�axe vertical th�orique de
l�adversaire.
Cin�matique du
point : la canne d�crit un arc d�ellipse en premi�re approximation. Le
mouvement piston-bielle est une meilleure approximation de la cin�matique.
La r�alit� de
la cin�matique est beaucoup plus complexe. En effet chaque articulation a
elle-m�me pratiquement 6 degr�s de libert�. Avec 4 articulations
(�paule/thorax, bras/�paule, bras/avant-bras, avant-bras/poing), on se retrouve
donc en r�alit� avec plus de 24 degr�s de libert� � g�rer pour obtenir la
trajectoire acad�mique � 2 degr�s de libert� (le plan). De plus, les 2 degr�s
de libert� tant sont li�s entre eux g�om�triquement (la longueur du bras est
constante).
� Crois� t�te ou haut.
Cin�matique
simplifi�e du mouvement de la canne : pour amener la canne dans son plan
vertical d�attaque, la trajectoire de la canne est inscrit dans un sph�re. La
canne �volue alors dans un plan vertical passant par l�axe vertical th�orique
de l�adversaire.
Cin�matique du
point : lorsqu�elle arrive dans le plan vertical elle d�crit un arc de
cercle.
� Crois� bas ou jambes.
Cin�matique simplifi�e du mouvement de la canne : la canne pivote par
rapport � l��paule, elle d�crit un c�ne dont la g�n�ratrice se confond avec
l�ensemble bras/canne. Le c�ne est � base circulaire.
� Lat�ral crois� (t�te, flanc, bas ou jambes).
Cin�matique
simplifi�e du mouvement de la canne : 1 ensemble rotation+translation inclin�e
(mise en �uvre par le bras) + 1 rotation par rapport � un axe vertical passant
part la main + 1 deuxi�me rotation par rapport � un autre axe vertical + 1
translation rectiligne en direction de l�adversaire. L�ensemble donne un effet
de d�veloppante de fouet. La canne �volue dans un plan horizontal
Cin�matique du
point : lorsqu�elle arrive dans le plan horizontal elle d�crit une courbe
voisine de la cardio�de.
� Lat�ral ext�rieur (t�te, flanc, bas ou jambes).
Cin�matique
simplifi�e du mouvement de la canne : 1 translation rectiligne oblique de la
canne (mise en �uvre par une rotation du bras par rapport � un axe horizontal
dirig� vers l�adversaire) + 1 rotation par rapport � un axe vertical. L�ensemble
donne un effet de d�veloppante de fouet. La canne est �volue dans un plan
horizontal.
Cin�matique du
point : la canne d�crit un semblant d�arc d�ellipse
� Enlev� (c�est un coup bas port� en jambe avant ou en
jambe arri�re).
Cin�matique simplifi�e du mouvement de la canne : la canne pivote par
rapport � la manchette, elle d�crit un c�ne dont la g�n�ratrice passe par la
main et dirig�e vers l�adversaire � la fin du mouvement + 1 translation
rectiligne de la main vers l�adversaire . Le c�ne est � base elliptique.
IMPORTANT :
Ne pas confondre le Lat�ral crois� bas et le Crois� bas
1.1.3/ Les zones de
frappe autoris�es
T�te :
Autoris�: Haut de le t�te. Les deux cot�s de la t�te (la
touche est au niveau de l�oreille) : devant de la t�te ou grille du casque
Interdit : Nuque, cou, gorge, yeux, derri�re de t�te
Flanc :
Autoris�: En dessous de l�aisselle et au dessus de la
ceinture
Interdit: Les �paules, le dos, les bras, la main arm�e et
en comp�tition le buste pour les femmes.
Bas ou jambes :
Autoris�: En dessous du genou et au dessus de la
cheville. Donc les frappes sont : sur le devant, les cot�s, et le derri�re de
la jambe.
Interdit: Cuisse, genoux, pieds, cheville
[Dessin : Chevalier du XXI�me � � venir]
1.1.4/ Zones strictement interdites
avec la canne :
� Coup de pointe ou de manchette, coup de talon,
taper la main arm�e, taper sur les zones de frappes interdites et sur toutes
les zones de frappe dangereuses. Exemple : les yeux, le triangle g�nital et le
buste pour les femmes (mais seulement en comp�tition) .
� La canne s�arr�te toujours sur l�adversaire et ne
balaye jamais devant.
1.1.5/ La garde
� Garde classique : Quand vous �tes en garde � droite (main droite tenant la
canne) le pied droit est toujours devant le pied gauche. (�cartement des pieds
de la largeur des �paules)
� Garde classique : Quand vous �tes en garde � gauche (main gauche tenant la
canne) le pied gauche est toujours devant le pied droit (�cartement des pieds
de la largeur des �paules).
� Garde inverse : Aujourd�hui la frappe en garde inverse est autoris�e, mais
l�arm� doit �tre imp�rativement
r�alis� !
Dans les deux cas (garde � droite ou garde � gauche) la
pointe du pied est toujours dirig�e vers le partenaire. Cette pointe ne se
ballade ni � droite ni � gauche.
ATTENTION : La pointe de la
canne n�est jamais dirig�e vers les yeux de votre partenaire.
Garde inverse :
Aujourd�hui la frappe en garde inverse est
autoris�e, mais l�arm� doit �tre imp�rativement
r�alis� !
1.1.6/ Les parades et leur cin�matique
Les parades r�pondent � la loi cannistique � ne
pas �tre toucher avant de toucher �, en d�autres termes � conserver
son int�grit� pour pouvoir contre-attaquer �. En mode martial si l�attaque
a touch� il n�y a plus de contre-attaque possible, puisqu�il n�y a plus de
contre-attaquant.
Les parades r�pondent �galement � une autre loi
cannistique, une condition de base � Si la canne n��tait pas en parade,
alors la touche serait marqu�e par l�adversaire �. Mais de la m�me mani�re
� Si l�attaque adverse est trop courte, la parade n�est pas utile �.
Cette phrase a le m�me sens que la pr�c�dente est pourtant, elle sous-entend un
savoir-faire non n�gligeable dans l�appr�ciation des distances.
Derri�re la notion de parade on retrouve donc une
notion d�appr�ciation de la distance de la canne adverse et la notion d�une
parade effectu�e avec mouvement �conomique et ajust� (LA bonne distance).
Ces 2 notions se r�sument ainsi : � Intercepter
la canne adverse au plus pr�s de son corps �
Les distances d�une parade
-
distance trop longue :
fonctionnellement le mouvement est efficace, il a rempli sa fonction premi�re
MAIS
o
la canne est loin d�une
position valable pour une contre-attaque. Le ��trop�� de distance doit �tre
repass� en marche arri�re avant de contre-attaquer.
o
perte de temps et d��nergie
o
erreur typique du d�butant
(aller � la rencontre de la canne adverse dans un long mouvement)
-
distance trop courte :
le coup passe malgr� le mouvement de parade.
-
distance optimum
o
permet d�encha�ner
d�autres mouvements : la fin du mouvement de la parade est le d�but du
mouvement suivant sans autre forme d�ajustement (bras � replacer�)
o
passer d�une parade � une
autre est ais� sans mouvement inutile. Un individu concentr� peut devenir
intouchable.
Vu autrement la parade est une optimisation du
chemin � parcourir pour la canne. Le chemin doit �tre minimis� tout en passant
par des points obligatoires. Le contact avec la canne adverse est le
check-point de la parade avec une condition suppl�mentaire � satisfaire (� Si
l�attaque adverse est trop courte, il n�y a pas de parade � mettre en
oeuvre �). De plus le mouvement doit �tre efficace tout en �tant
�conomique en moyens utilis�s et en �nergie d�pens�e
Associ� � cette notion de distance, on retrouve le
temps de r�action dont on reparlera plus loin.
Les parades
En partant d�une garde � droite voici le nom
des parades.
On trouve des Parades crois�es et des Parades ext�rieures.
Les Parades de Canne sont toujours faites en biais et sont tr�s proches du
corps
Parades sur un : Bris� ou Crois� t�te (2 coups
diff�rents) ==> Il y a deux parades diff�rentes pour le dessus de la
t�te.
� La parade sur un Bris� ou sur un Crois� t�te se nomme :
Parade ext�rieure t�te ou parade ext�rieure haute.
Cin�matique simplifi�e du mouvement de la canne :
la parade la plus efficace est la rapide, donc comme la plus courte distance
entre 2 points est la ligne droite, la parade optimum suit une ligne droite. A
la translation g�n�rale du bras en direction de l�attaque adverse (verticalement ou � 45�), la canne tourne par
rapport � un axe horizontal passant par la main pour se retrouver l�g�rement en
d�vers (extr�mit� de touche de la canne l�g�rement point�e vers le bas). Ce
l�ger angle n�gatif permet de d�vier l�impact et sa force.
� La parade sur un Bris� ou sur un Crois�
t�te se nomme : Parade crois�e t�te ou parade crois�e haute,
Cin�matique simplifi�e du mouvement de la canne :
A la translation g�n�rale du bras en direction de l�attaque adverse (� - 45�),
la canne tourne par rapport � un axe horizontal passant par la main et se
retrouver l�g�rement en d�vers (extr�mit� de touche de la canne l�g�rement
point�e vers le bas). Ce l�ger angle n�gatif permet de d�vier l�impact et sa
force. La posit<ion finale de la canne est sym�trique par rapport � la
pr�c�dente parade.
Exemple de ripostes
� La parade crois� t�te peut appeler comme riposte : le
Lat�ral crois� t�te, flanc, ou jambes.
� La parade ext�rieure t�te peut appeler comme riposte : le
Lat�ral ext�rieur t�te, flanc, ou jambes.
Parades sur un : Lat�ral ext�rieur (t�te, flanc,
bas ou jambes)
� La parade sur un lat�ral ext�rieur t�te se nomme :
Parade crois�e t�te
Cin�matique simplifi�e du mouvement de la
canne : Une rotation de la main (environ -45�) devrait amener la canne
verticalement et activer la parade. Une l�g�re translation verticale permet de
r�gler la parade.
� La parade sur un lat�ral ext�rieur flanc se
nomme : Parade crois�e flanc. En escrime
c�est la QUARTE
Cin�matique simplifi�e du mouvement de la
canne : Une rotation de la main
(environ -45�) devrait amener la canne verticalement et activer la parade.
� La parade sur un lat�ral ext�rieur bas ou jambes sur la
jambe avant ou arri�re se nomme : Parade crois�e basse ou jambes. . En escrime c�est la PRIME.
Cin�matique simplifi�e du mouvement de la
canne : Une rotation de la main (environ 135�) devrait amener la canne
verticalement et activer la parade. Une l�g�re translation verticale permet de
r�gler la parade.
Pour la parade basse
� Si vous faites une esquive sur un coup de canne
port� en jambes, je vous rappelle que vous ne faites donc pas de parade. Pour
rappel : c�est soit une esquive, soit une parade. Pas les deux en m�me temps.
Parades sur un : Lat�ral crois� (t�te, flanc, bas
ou jambes)
� La parade sur un Lat�ral crois� t�te se nomme : Parade
ext�rieure t�te,
Cin�matique simplifi�e du mouvement de la
canne : A la translation g�n�rale du bras en direction de l�attaque
adverse (� - 45�), Une rotation de -45� de la main devrait amener la canne
verticalement et activer la parade. Une l�g�re translation verticale permet de
r�gler la parade
� La parade sur un Lat�ral crois� flanc se
nomme : Parade ext�rieure flanc. . En escrime
c�est la TIERCE
Cin�matique simplifi�e du mouvement de la
canne : A la translation g�n�rale du bras en direction de l�attaque
adverse (� - 45�), Une rotation de -45� de la main devrait amener la canne
verticalement et activer la parade.
� La parade sur un Lat�ral crois� bas ou
jambes se nomme : Parade ext�rieure basse ou jambes. . En escrime c�est la SECONDE.
Cin�matique simplifi�e du mouvement de la
canne : th�oriquement, une rotation de la main (environ 135�) avec une
translation �45� vers le bas devrait amener la canne verticalement et activer
la parade. Mais g�n�ralement ce mouvement intercepte le pied. Donc la
translation ne peut �tre effectu�e directement, pour positionner correctement
la main c�est trajectoire quasiment circulaire qui est employ�e.
Parades sur un : Crois� bas ou jambes et sur un Enlev�
bas ou jambes (2 coups diff�rents)
Prenons la jambe avant comme exemple
� Les parades sur un Crois� bas ou sur un Enlev� se
nomment : Parade ext�rieure basse ou parade ext�rieure jambes.
ou pour l�autre cot� de la jambe : Parade crois�e
basse ou parade crois�e jambes ( difficile � faire )
Une rotation de la main (environ 135�)
amener la canne verticalement et activer la parade. Une l�g�re translation
verticale permet de r�gler la parade.
N.B : Je vous rappelle que vous pouvez dire : Un Crois�
bas ou un Crois� jambes. Un Crois� t�te ou un Crois� haut.
Personnellement je pense que les termes Crois� t�te et
Crois� jambes sont plus appropri�s.
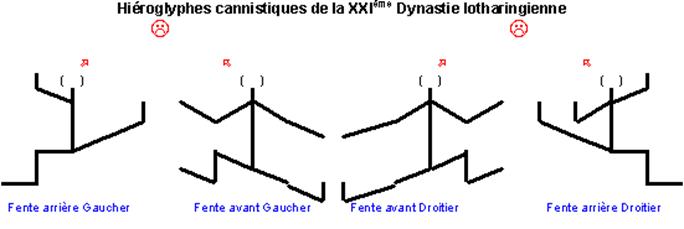
1.1.7/
Comment attaquer en ligne basse : Les fentes
Les fentes en 4 pictogrammes
1.1.8/
Validit� de la touche
Pour qu�un coup ou une touche
soit compt� comme point, il faut :
� Que le coup soit arm�.
� Que la touche soit franche et nette.
� Que la canne frappe sur une partie autoris�e.
� Que le coup soit port� avec le quart sup�rieur de la
canne (voir remarque N�1)
� Que la canne soit dans le prolongement du
bras.
� Que le coup ne soit pas sabr� (voir remarque
N�2)
Remarque N�2 : Comparaison
de l�efficacit� du Coup ��sabr钒 par rapport au coup acad�mique ��tendu��
Appliquons la m�me force aux
coups :
1er cas :
cou acad�mique
Moment1 =Fx(Dc+Avb+B)
Hypoth�se
simplificatrice :Avb=B et Dc=2,5xB ==> Moment1 = 4,5xBxF
Hypoth�se
simplificatrice :Avb=B et Dc=2xB ==> Moment1 = 4xBxF
2�me
cas : canne sabr�e
la canne � 30� par rapport �
sa position th�orique : c�est 13% de bras de levier en moins (√3/2)
de la longueur DC
Moment2 =
Fx(√3/2xDc+Avb+B)
Hypoth�se
simplificatrice :Avb=B et Dc=2,5xB ==> Moment2 = 4,165xBxF soit plus de 7% de
perte d�efficacit�
Hypoth�se
simplificatrice :Avb=B et Dc=2xB ==> Moment2 = 3,73xBxF soit 6,7% de perte
d�efficacit�
3�me
cas : canne sabr�e et bras pli�
la canne et le bras sont �
30� par rapport � leur position th�orique.
Moment3 =
Fx(√3/2xDc+√3/2xAvb+B)
Hypoth�se simplificatrice :Avb=B et Dc=2,5xB
==> Moment3 = 4,031xBxF soit plus de 10% de perte d�efficacit�
Hypoth�se
simplificatrice :Avb=B et Dc=2xB ==> Moment3 = 3,398xBxF soit plus de 10% de
perte d�efficacit�
En r�sum� : De 7% �
10% de perte d�efficacit� pour un mouvement sabr�.
Nous reviendrons au chapitre
3 de mani�re plus d�taill�e sur les touches.
1.1.9/
Les transferts du poids du corps
Rappel du placement du poids du
corps pour les attaques : QUAND VOUS ETES EN GARDE A DROITE
Le poids du corps est sur les deux jambes (pied
droit en face de son partenaire. Ecartement des jambes de la largeur des
�paules. Pied gauche plac� en retrait a 45 �)
POIDS DU CORPS POUR LE LATERAL EXTERIEUR TETE
Quand vous armez un Lat�ral ext�rieur t�te : Le poids du
corps est sur la jambe droite � 95 % ( les 2 jambes sont tendues )
D�veloppement complet du bras au dessus de la t�te. Quand vous donnez un
Lat�ral ext�rieur t�te : Le poids du corps est sur la jambe droite � 95 % (les
2 jambes sont tendues)
POIDS DU CORPS POUR LE LATERAL CROISE TETE
Quand vous armez un Lat�ral crois� t�te: Le poids du
corps est sur la jambe gauche � 95 % ( les 2 jambes sont tendues )
D�veloppement complet du bras au dessus de la t�te. Quand vous donnez un
Lat�ral crois� t�te :Le poids du corps est sur la jambe droite � 95 % ( les 2
jambes sont tendues )
POIDS DU CORPS POUR LE CROISE JAMBES OU BAS
Quand vous armez un Crois� bas :Le poids du corps est sur
la jambe gauche � 95 % ( les 2 jambes sont tendues ) D�veloppement complet du
bras en une rotation au plus pr�t du corps. Quand vous donnez un Crois� bas : Le
poids du corps est sur les deux jambes ( fente )
POIDS DU CORPS POUR LE CROISE TETE OU HAUT
Quand vous armez un Crois� t�te :Le poids du corps est
sur la jambe gauche � 95 % ( les 2 jambes sont tendues ) D�veloppement complet
du bras en une rotation au plus pr�t du corps. Quand vous donnez un Crois�
t�te: Le poids du corps est sur la jambe droite � 95 % (les 2 jambes sont
tendues)
POIDS DU CORPS POUR UN BRISE
Quand vous armez un Bris� :Le poids du corps est sur la
jambe droite � 95 % ( les 2 jambes sont tendues ) D�veloppement complet du bras
en une rotation au plus pr�t du corps. Quand vous donnez un Bris�: Le poids du
corps est sur la jambe droite � 95 % (les 2 jambes sont tendues)
POIDS DU CORPS POUR UN ENLEVE
Quand vous armez un Enlev� : Le poids du corps est sur la
jambe gauche � 100 % ( la jambe est tendue ) La jambe droite se l�ve et quitte
le sol. D�veloppement � 80% du bras en une rotation au plus pr�t du corps.
Quand vous donnez un Enlev� : Le poids du corps est sur les deux jambes ( fente
)
Merci
� Mr P. Roudillon (texte en bleu)
Les transferts de poids du
corps font partie des clefs d�entr�e pour la ma�trise de la canne de combat. D�autres
arts martiaux comme Le Tai-chi-chuan (art martial chinois) les ont �lev� au
rang de l�art du pied ��plein�� ou pied ��vide��.
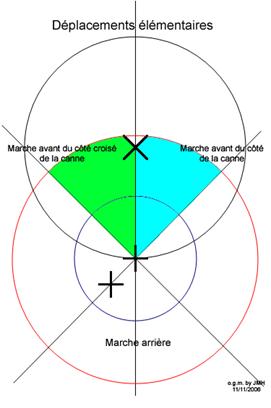
1.1.10/ Les d�placements
Les d�placements possibles sont la marche avant du
c�t� de la canne (M), la marche avant du c�t� oppos� ou crois� de la canne (MC),
la marche arri�re du c�t� de la canne (MArr), la marche arri�re du c�t� oppos�
de la canne (MArrC). Ce sont des d�placements courts.
La volte sans changement de main (V), la volte avec
changement de main (Va), la fente avant (F), la fente arri�re (Far), le saut
(S) et le bond (BD) sont des d�placements longs.
La gestion des d�placements est intimement li�e �
l�utilisation des distances de confrontation (touche, distance et r�cup�ration).
Nous analyserons les d�placements de 2 appuis au
plus. Nous
reparlerons des voltes au chapitre 1.6
1.2/ LES POSSIBILITES PHYSIQUES PERSONNELLES
La souplesse, la d�tente, la
force�
Sur ce vaste sujet les ouvrages de qualit� sont
l�gions, � vous de choisir. Ces notions seront fondamentales dans le choix des
encha�nements que nous allons �tudier.
1.3/ TEMPERAMENT : OFFENSIF / DEFENSIF
Voir 2.1/ Strat�gie de combat
1.4/ ANALYSE COMBINATOIRE DES MOUVEMENTS
1.4.1/ Combien d�encha�nements
peut-on r�aliser ?�
Nous allons calculer le nombre d�encha�nements que
l�on peut r�aliser avec les mouvements �l�mentaires. Le tableau des calculs
combinatoires est joint en annexe 1.
1.4.1.1/ Quantit� maximum possible
Dans cette premi�re approche calculatoire on ne diff�rencie
pas l�attaque en t�te ou en jambe (lat�ral crois� haut ou bas / lat�ral
ext�rieur haut ou bas).
1er
cas : on peut r�utiliser un mouvement
1�re
hypoth�se : 6 choix de mouvements possibles [Bris�, Crois� t�te ou haut,
Crois� bas ou jambes, Lat�ral crois� (t�te, flanc, bas ou jambes), Lat�ral
ext�rieur (t�te, flanc, bas ou jambes), Enlev� (c�est un coup bas port� en
jambe avant ou en jambe arri�re)].
2�me
hypoth�se : 5 mouvements encha�n�s au maximum (pr�conisation de Maurice
Sarry pour �viter une fatigue trop rapide).
5 mouvements : 65 soit 7 776 encha�nements
|
4 mouvements : 64 soit 1 296 encha�nements
|
3 mouvements : 63 soit 0 216 encha�nements
| �En
combinant ces encha�nements de diff�rentes longueurs
2 mouvements : 62 soit 0 036 encha�nements
| on obtient : 9 330
encha�nements diff�rents
1 mouvement
: 61 soit 0 006 encha�nements
|
2�me cas : on ne r�utilise pas 2 fois le m�me
mouvement
-
1�re
hypoth�se : 6 choix de mouvement possible
-
2�me
hypoth�se : 5 mouvements encha�n�s au maximum (pr�conisation de Maurice
Sarry pour �viter une fatigue trop rapide
5 mouvements :
6x5x4x3x2 soit 720 encha�nements |
4 mouvements :
6x5x4x3 soit 360 encha�nements |
3 mouvements : 6x5x4 soit
120 encha�nements | �En
combinant ces encha�nements de diff�rentes longueurs
2 mouvements : 6x5 soit 030 encha�nements | on obtient : 1 236 encha�nements
diff�rents
1 mouvement : 6 soit 006 encha�nements |
1.4.1.2/ Hypoth�ses ��simplificatrices�� :
L�enlev� et le crois� bas les �ternels oubli�s
En oubliant l�enlev�, 5 choix de
mouvements sont alors possibles :
1er
cas : on peut r�utiliser un mouvement
�En
combinant ces encha�nements de diff�rentes longueurs on obtient : 3 905
encha�nements diff�rents
2�er
cas : on ne r�utilise pas 2 fois le m�me mouvement
�En
combinant ces encha�nements de diff�rentes longueurs on obtient : 0 326
encha�nements diff�rents
En oubliant le crois� bas, 4 choix de
mouvements sont alors possibles :
1er
cas : on peut r�utiliser un mouvement
�En
combinant ces encha�nements de diff�rentes longueurs on obtient : 1 364
encha�nements diff�rents
2�er
cas : on ne r�utilise pas 2 fois le m�me mouvement
�En
combinant ces encha�nements de diff�rentes longueurs on obtient : 0 160
encha�nements diff�rents
1.4.1.3/ Hypoth�ses ��simplificatrices�� : 1
encha�nement = 3 mouvements maximum
1er
cas : on peut r�utiliser un mouvement
�En
combinant ces encha�nements de diff�rentes longueurs on obtient : 256
encha�nements diff�rents
2�er
cas : on ne r�utilise pas 2 fois le m�me mouvement
�En
combinant ces encha�nements de diff�rentes longueurs on obtient : 156
encha�nements diff�rents
En oubliant le crois� bas et l�enlev� 4
choix de mouvements sont alors possibles :
1er
cas : on peut r�utiliser un mouvement
�En
combinant ces encha�nements de diff�rentes longueurs on obtient : 84
encha�nements diff�rents
2�er
cas : on ne r�utilise pas 2 fois le m�me mouvement
�En
combinant ces encha�nements de diff�rentes longueurs on obtient : 40
encha�nements diff�rents
Analyses des r�sultats
En retirant un mouvement, on appauvri
consid�rablement le jeu possible. La richesse du jeu est divis�e par 2 ou par 4
suivant les cas. En oubliant 2 mouvements, le jeu est de 6 � 8 fois moins
riche.
Tous les encha�nements ne sont pas de m�me qualit�s.
Les encha�nements irr�alisables physiologiquement devraient �tre �limin�s.
Mais la notion de mouvement irr�alisable est fortement li�e � la capacit�
physique et physiologique du canniste . Donc il n�y a pas de moyen simple
de les d�tecter et de les �liminer des choix possibles. De plus, un
encha�nement difficile peut �tre tr�s performant�justement parce qu�il est
in�dit (notion d�habitude/incertitude). Des encha�nements long � r�aliser ou
bien pr�visibles peuvent servir d�autres desseins (habitude/feinte).
Et enfin il reste les encha�nements ou l�on se
d�couvre pendant leur ex�cution (zone de frappe largement expos�e �
l�adversaire).
Les encha�nements de faibles qualit�s intrins�ques
(peu d�incertitude, pr�visibles, simples..)
ont malgr� tout une qualit� : ��sur une malentendu �a peut
marcher��. Ce type d�encha�nement peut �tre utilis� en FEINTE DE�
Le coin
du sp�cialiste : Cet apprentissage par
�limination appel� aussi � mod�le g�n�tique �. Il peut �tre mis en
�uvre par des syst�mes de classeur Q-learning(ZCS), ces syst�mes sont compos�s
d�une population de r�gles appel�es classeurs auxquels on associe le r�sultat
quantifi� de l�action (force degr� de qualit� du r�sultat).
R�gles =
fonction([condition],[Action],[force]).
Au fur et � mesure de l�apprentissage, on
attribue aux r�gles donnant les meilleurs r�sultats le niveau de force le plus
�lev�. Les anciens classeurs poss�dant des r�gles peu efficaces sont �limin�s progressivement
Cet algorithme g�n�tique de s�lection naturelle est n�anmoins � utiliser avec
r�serves ; �liminer des encha�nements de faible qualit� revient �galement
� appauvrir l�incertitude.
1.4.1.3/ Autre approche combinatoire associant le
mouvement � son niveau d�attaque
Les mouvements sont diff�renci�s suivant le niveau
d�attaque : 8 mouvements possibles [Bris�, Crois� t�te ou haut, Crois� bas
ou jambes, Lat�ral crois� (t�te ou flanc),
Fente avec lat�ral crois� bas, Lat�ral ext�rieur (t�te ou flanc) Fente
avec lat�ral ext�rieur bas, Enlev�
L�annexe 1 donne le chiffrage des diff�rents
mouvements possibles. Bien que le volume d�encha�nements possibles soit �lev�
dans ces cas de figure, on peut noter que lorsqu�on impose un ��fil directeur��
� l�encha�nement, la quantit� des choix possible descend tr�s rapidement.
Analyses des r�sultats
Par cette autre approche, on d�couvre que les
encha�nements �labor�s � ��haute qualit� intrins�que�� ne sont pas tr�s
nombreux. Les encha�nements �labor�s ne sont donc pas la seule clef du succ�s
du combat. D�autres notions doivent rentrer dans la composition du combat afin
de compl�ter la panoplie du canniste. Les d�placements et les ��suites avec fil
directeur�� peuvent apporter de nouvelles composantes.
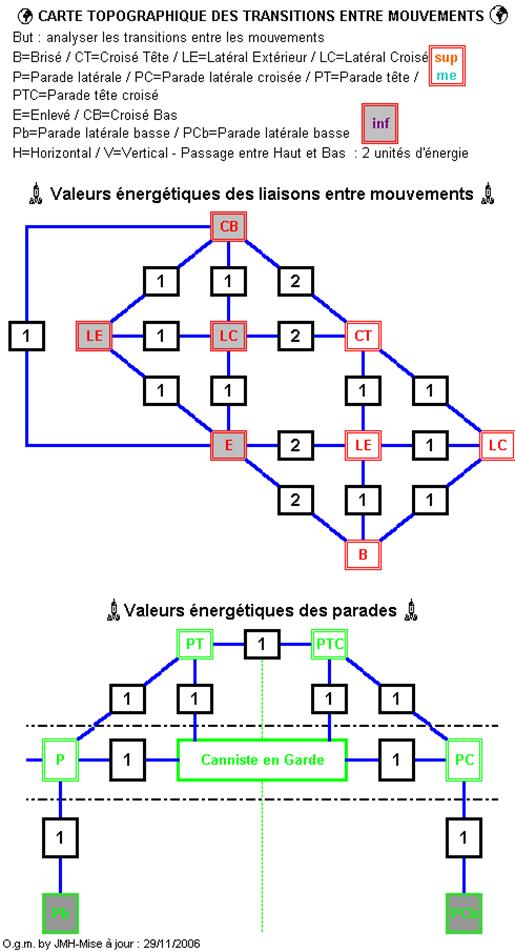
1.4.1.4/ La combinatoire et la notion d��tage
de combat G
Regroupons les mouvements
selon le niveau de l�attaque
�Le
Rez-de-chauss�e (attaques en ligne basse) [Niveau O] : Crois� bas ou
jambes, Fente avec lat�ral crois� bas,, Fente avec lat�ral ext�rieur bas, Enlev�
- 4u/9u (45%)
�Le 1er
�tage (attaques en ligne m�diane et haute) [Niveau 1] : Crois� t�te ou
haut, Lat�ral crois� (t�te ou flanc), Lat�ral ext�rieur (t�te ou flanc) � 3u/9u
(33%)
�Le 2�me �tage (attaques verticale) [Niveau 2] : Bris�,
Crois� t�te ou haut 2u/9u (22%)
Energie entre �tage
On peut se rendre compte que 2 �tages d��carts
entre les 2 derni�res attaques donnent la distance la plus longue pour la
riposte adverse. Ces encha�nements ont donc plus de chance de faire mouche. On
peut classer le premier mouvement en tant que leurre. Si entre chaque mouvement
on a 2 �tages alors l�encha�nement sera physique. Plus l��cart entre �tage est
important plus l��nergie d�pens�e est importante.
En haut ou en bas ?
Un compromis devra �tre trouv� entre la richesse
des mouvements en ligne basse (ils repr�sente pr�s de la moiti� des mouvements
possibles) et leur exposition et vuln�rabilit� face � une riposte adverse.
1.4.2/ Combien de coups peut-on placer
dans un combat ?�
3 minutes de combat � combler de jolis gestes
cannistiques soit 180 secondes � remplir !
R�pondons � quelques questions : Quelle est le
temps d�un encha�nement ? quel est le temps entre chaque encha�nement ?
quel est le pourcentage de feintes et de
mouvements parasites ? quel est le pourcentage d�encha�nements doubl�s
(habitus) ? et enfin quel est le
pourcentage de temps pendant lequel le cannniste va pouvoir s�exprimer face �
l�adversaire qui veut lui aussi s�exprimer.
Un tr�s bon canniste va encha�ner 3 mouvements en 1
seconde. Il va se remettre en garde et r�cup�rer pendant 0,5 seconde (hypoth�se
tr�s optimiste). Il va consommer un encha�nement en 1,5 secondes.
Si l� on intercale 10% de feintes, mouvements parasites
et d�placements ;
Si on y rajoute la th�orie de l�Habitus. Pour
mettre en place cet habitus on va r�p�ter 10% des mouvements 2 fois.
De plus, il ne faut pas oublier qu�on est pas seul
et l�adversaire cherche aussi � s�exprimer une partie du temps ; Si les
adversaires sont de force �quilibr�e on va s�exprimer 50% du temps.
Voici quelques simulations au voisinage de valeurs
d�j� �lev�es et performantes :
|
Hypoth�ses de travail
|
|
|
|
|
|
|
|
|
|
|
Dur�e du combat : 3 min
|
180
|
180
|
180
|
180
|
180
|
180
|
180
|
180
|
180
|
|
Temps de l'encha�nement
|
1
|
1
|
1
|
1
|
1
|
1
|
1,5
|
1,5
|
1
|
|
Nombre d'encha�nements par
seconde :
|
0,5
|
0,5
|
0,5
|
0,75
|
1
|
1
|
1
|
1
|
1
|
|
Temps entre les
encha�nements
|
1
|
2
|
2
|
1
|
1
|
1,5
|
1,5
|
2
|
2
|
|
Pourcentage de feintes et
mouvements parasites
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
15%
|
30%
|
|
Pourcentage
d'encha�nements doubl�s (habitus)
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
|
Pourcentage d'expression
|
50%
|
50%
|
50%
|
50%
|
50%
|
50%
|
50%
|
50%
|
50%
|
|
Nombre d'encha�nements
� r�aliser
|
18
|
12
|
12
|
27
|
36
|
29
|
24
|
20
|
19
|
|
|
|
|
|
|
|
|
|
|
|
|
Dur�e du combat : 3 min
|
180
|
180
|
180
|
180
|
180
|
180
|
180
|
180
|
180
|
|
Temps de l'encha�nement
|
1,5
|
2
|
1,5
|
1,5
|
2
|
2
|
2
|
2
|
1
|
|
Nombre d'encha�nements par
seconde :
|
0,5
|
0,25
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
|
Temps entre les
encha�nements
|
3
|
3
|
2
|
3
|
3
|
4
|
4
|
4
|
2
|
|
Pourcentage de feintes et
mouvements parasites
|
10%
|
10%
|
25%
|
10%
|
10%
|
10%
|
10%
|
15%
|
30%
|
|
Pourcentage
d'encha�nements doubl�s (habitus)
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
10%
|
|
Pourcentage d'expression
|
50%
|
50%
|
50%
|
50%
|
50%
|
50%
|
50%
|
50%
|
50%
|
|
Nombre d'encha�nements
� r�aliser
|
8
|
4
|
17
|
16
|
15
|
12
|
12
|
11
|
19
|
|
|
|
|
|
|
|
|
|
|
|
|
Moyenne :
|
16
|
encha�nements
par combat
|
|
|
Analyses des r�sultats
Une moyenne de 16 encha�nements est d�j� un volume
d�attaques tr�s honorable, et il faut tenir cette cadence jusqu�� la fin du
combat.
Cela revient � choisir moins d�une vingtaine
d�encha�nements diff�rents dans la base de donn�es de notre savoir cannistique.
En se limitant aux paquets de 3 encha�nements (120
possibilit�s sans reprendre 2 fois l�encha�nement), on pourrait donc r�aliser plus
de 7 combats sans se r�p�ter ! Une
cinquantaine d�encha�nements mouvements � � valeur ajout�e � de 3
mouvements ont �t� r�f�renc�e sur savate-canne.com.
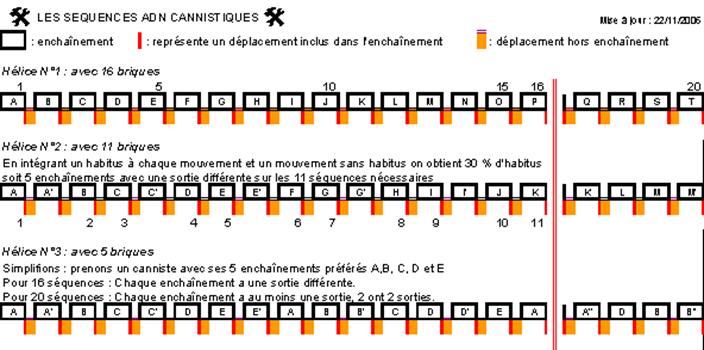
1.4.3/
Les s�quences ADN cannistiques�
Le combat est le d�roulement de s�quences de
mouvements. Analysons cet arrangement de
briques �l�mentaires.
1.4.3.1/ Comment agencer les s�quences durant le
combat ?
L�hypoth�se veut �galement que notre canniste ait
l�initiative au moins 50% du temps.
Les s�quences de mouvement � encha�ner sont au
nombre de 16 unit�s. En mettant en place un habitus � chaque nouvelle s�quence,
on obtient 11 s�quences diff�rentes � d�biter (h�lice N�2).
Avec l�h�lice N�3, le canniste ne conna�t que 5
mouvements mais ses 5 s�quences ont au moins 2 sorties.
Synth�se
Des � Petits encha�nements aux noms
imag�s � appel�s �galement �Savoir cannistique d�un ma�tre de canne �
ont �t� r�f�renc�s sur http://www.savate-canne.com
. Une cinquantaine d�encha�nements � forte valeur ajout�e sur les 216 que
l�on peut trouver (avec r�p�tition des
mouvements) c�est moins de 30% des s�quences possibles. On peut faire
l�analogie avec la surface des terres �merg�es par rapport aux surfaces des
oc�ans. Dans ce vaste monde, un navigateur de qualit� est utile pour trouver le
bon chemin.
Un canniste avec un bagage des 5
� Sp�ciaux � a choisi 2% des choix possibles de s�quences. Un
discernement certain est de mise pour avoir 5 bonnes s�quences adapt�es au
profil du canniste.
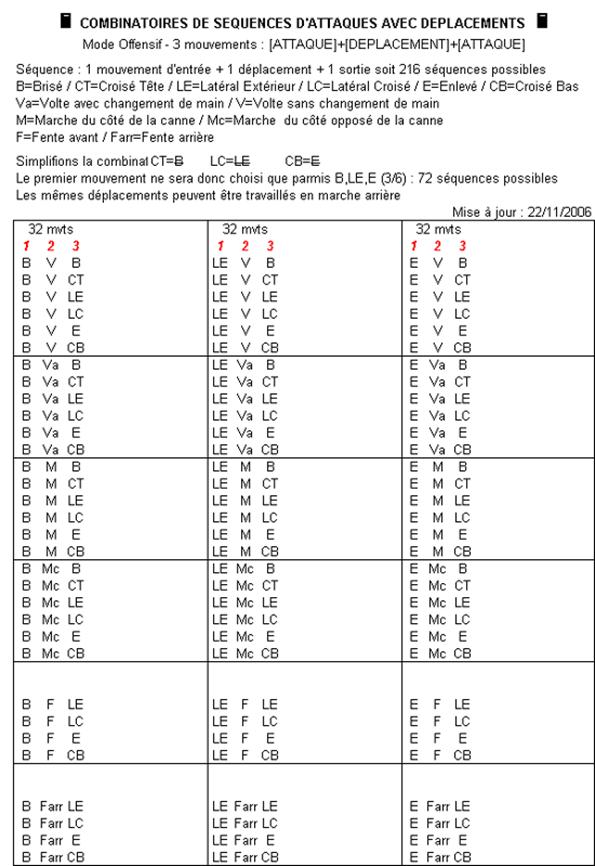
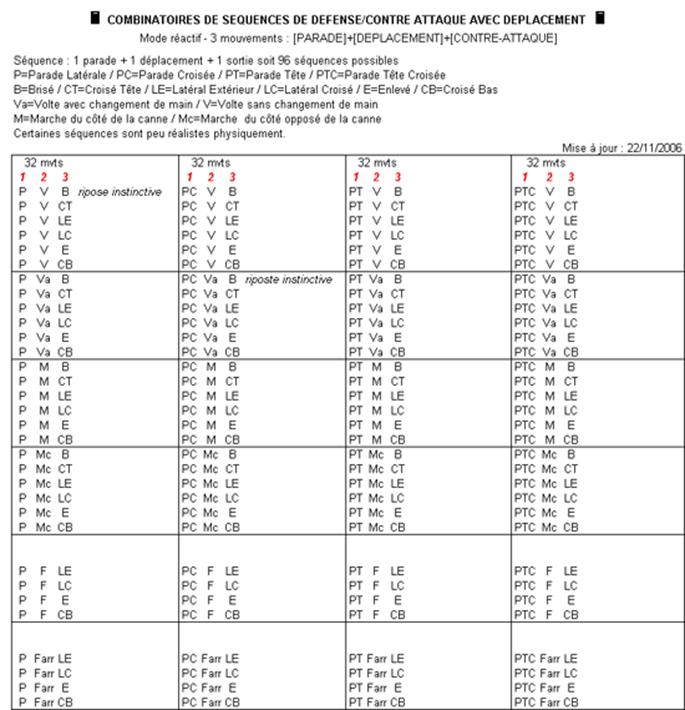
1.4.3.2/ Quelles sont les s�quences ADN disponibles ?
Nous allons �tudier 4 types de s�quence : des
s�quences d�attaques avec ou sans d�placement (mode offensif) et des s�quences
de D�fense-Contre attaque avec ou sans d�placement (mode r�actif).
-
3 attaques (mode offensif)
: � Tableau des ma�tres offensifs
, ma�tres du jeux � - la canniste attaque en rafale, c�est un
va-t-en-guerre, il n�a qu�� attaquer, il survole le jeux.
-
Attaque + D�placement +
Attaque (mode offensif) : � Tableau des ma�tres offensifs, ma�tres de
la gu�rilla �
-
D�fense + Contre-attaques
(mode d�fensif ou r�actif) : � Tableau des Ma�tres d�fensifs, Ils ne
passeront pas � - le canniste se d�fend sur place.
-
D�fense + D�placement +
Contre-attaque (mode d�fensif ou r�actif) : � Tableau des Ma�tres
d�fensifs, LE mouvement �.
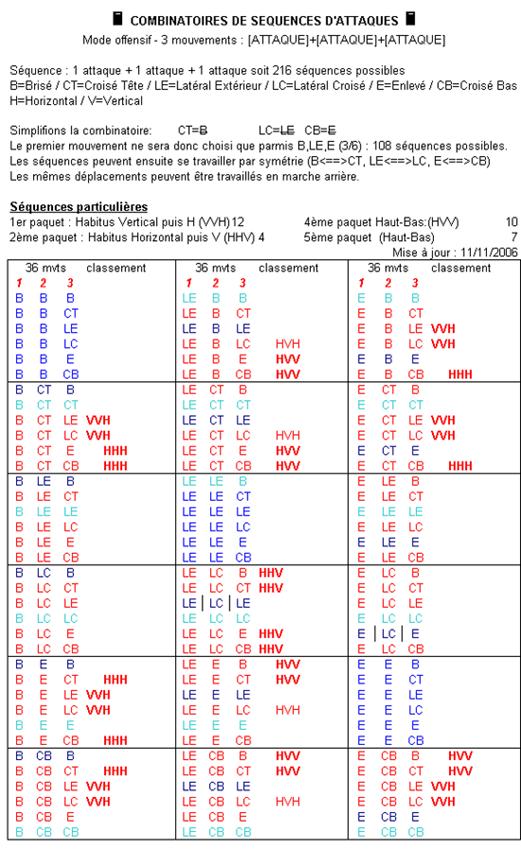
� Tableau des ma�tres offensifs , ma�tres du jeux �
Analyses des r�sultats
Sur la totalit� des s�quences, on remarque une
trentaine d�encha�nements avec des caract�ristiques plus sophistiqu�es (avec un
logique sous-jacente) : l�Habitus vertical, l�Habitus Horizontal, la
grande amplitude Haut-Bas. Ces 3 crit�res de classement nous resserviront.
� Tableau des Ma�tres d�fensifs, Ils ne passeront
pas �
Analyses des r�sultats
Le � Tableau des Ma�tres d�fensifs, ils ne
passeront pas � donne des s�quences automatiques de mouvements. En suivant
cette mani�re de travailler le choix est fait au d�but de la s�quence lorsque
la parade est choisie. Le crit�re Haut/Bas par exemple ne peut pas �tre choisi
juste � la fin de la s�quence (notion d�incertitude). On peut distinguer des
s�quences n�cessitant une forte �nergie (voir � Tableau des valeurs
�nerg�tiques des liaisons entre mouvements paragraphe 1.4.1.4). Les s�quences
� coul�es � sont les encha�nements qui d�marrent au plus pr�s de la
parade. Sinon on retrouve le m�me classement que pour le tableau.
� Tableau des Ma�tres offensifs, Ma�tres de la guerilla �
Analyses des r�sultats
Dans ce tableau on retrouve quelques encha�nements
pr�f�r�s de nos champions, leurs � sp�ciaux ��.� m�diter et �
travailler !
� Tableau des Ma�tres
d�fensif, la guerre de mouvements �
Analyses des r�sultats
Dans ce tableau on retrouve �galement quelques
encha�nements plus �labor�s que le ferraillage des attaques multiples.
A noter que l�on peut enrichir la cin�matique sans
toucher � la structure du syst�me mis en place.
1.4.4/ Rapprochement
avec la strat�gie de combat NEGATIV SPLIT en Boxe fran�aise�
Qu�est ce que la strat�gie de combat � Negativ
Split � en BF ?
- Des s�ries courtes et s�par�es pour ne pas
s��puiser : c�est moins �vident en canne (saturation de l�attention
adverse)
- Varier les trajectoires afin de ne pas
sursolliciter les m�mes groupes musculaires : valable �galement en canne �
double titre (musculaire et pour
surprendre avec une sortie diff�rente)
- Rechercher la vitesse et la pr�cision que la
force ou la puissance : postulat de base en canne pour que la touche
compte.
- 1�re partie du combat : on se
m�nage
- 2�me partie du combat : on l�che
toute la puissance et vitesse.
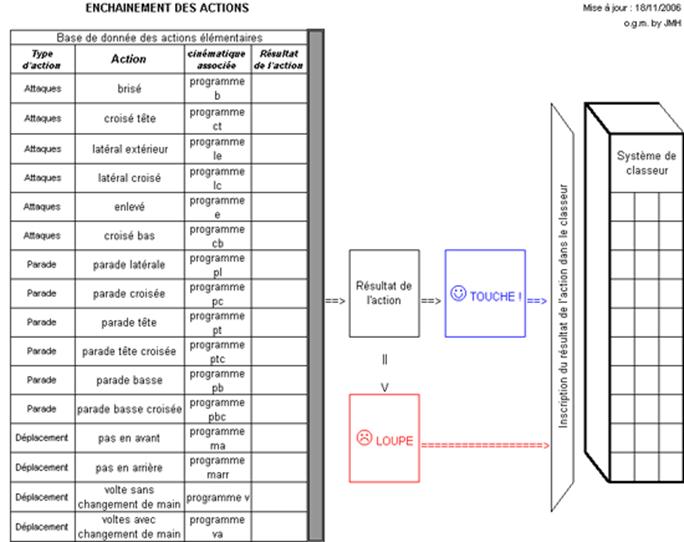
1.4.5/ Comment s�encha�nent
l�ensemble des actions ?
- Une action �l�mentaire est choisie : elle
actionne une cin�matique de transition avec l��tat ant�rieur ainsi qu�une cin�matique
associ�e � l�action choisie.
- Un automatisme �l�mentaire g�re la cin�matique de
l�action �l�mentaire. La protection de l�individu peut �tre int�gr�e � ce
niveau, nous en reparlerons plus loin.
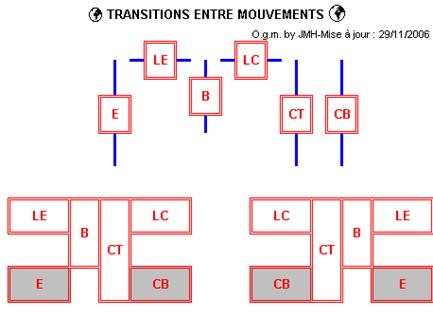
Les r�gles de transition possibles : Chaque
mouvement (des membres sup�rieurs) repasse toujours par le point neutre, la
garde de combat (1er r�gle de transition). La 2�me r�gle
de transition possible g�re les transitions en fonction de l�action ant�rieure
et de l�action � venir. Elle est plus �labor�e.
1.4.6/ Programmation d�un bloc
cin�matique
Le bloc cin�matique contient la programmation des
actionneurs � activer afin d�obtenir l�action. On y trouve l�ordre dans lequel
les diff�rents mouvements doivent �tre enclench�s, la vitesse d�ex�cution, le
gradient �ventuel dan la vitesse d�ex�cution (acc�l�ration finale par exemple).
Exemple d�un bloc cin�matique d�attaque :
Le r�glage de la cin�matique vient d�un param�tre
d�entr�e, la distance. Le d�placement permet de r�gler grossi�rement la bonne
distance. La rotation par rapport �
l�axe vertical permet d�ajuster l�attaque au final par exemple (voir sh�ma
� ajustement final de la distance de frappe �).
Pour les blocs cin�matiques d�attaque comme le
lat�ral ou le lat�ral crois�, il est possible de r�gler �galement la distance
en choisissant soit en haut (faible distance) soit en bas (fente et donc
distance plus longue). Pour savoir si le choix haut ou bas est possible il faut
avoir acc�s � l�information � position de la canne � via un flux
entrant d�informations visuelles.
1.4.7/ Analyse combinatoire de la
double canne (� venir)
1.5/ ANALYSE CINEMATIQUE & DYNAMIQUE DU BATON
1.5.1/ Inertie g�n�rale du b�ton
(� venir)
1.5.2/ Analyse cin�matique du
b�ton
On peut simplifier l�analyse du d�placement du
b�ton en analysant 2 vitesses, une vitesse de d�placement g�n�ral de son centre
de gravit� (grosso modo au niveau de la main �terre��) et une vitesse autour de
son centre de gravit�. Bien entendu le mouvement r�el est la composante des 2.
Premi�re mod�lisation simplifi�e possible :
-
le d�placement du b�ton
est r�alis� par la main ��ciel��,
-
la main ��terre�� r�gle la
position relative du b�ton ; elle sert �galement de pivot de rotation.
En canne sont possibles l�arr�t imm�diat de la
canne, le changement de trajectoire et m�me une inversion du sens de la
trajectoire. La pr�sence d�appuis au sol n�est pas un facteur d�terminant dans
ces modifications m�me majeures.
Il n�en est pas de m�me pour le b�ton. Un mouvement
rapide de b�ton va entra�ner une forte inertie du b�ton. En d�autres termes la
modification de trajectoire sera d�autant plus difficile que le b�ton a une
vitesse �lev�e. Arr�ter le mouvement du b�ton, inverser son sens de marche sont
�nerg�tiquement gourmands � r�aliser. Ils n�cessitent de plus des appuis au
sol. Un encha�nement facile � r�aliser d�viera la trajectoire mais ne la
cassera pas (�nergie importante pour casser la trajectoire), cela peut �tre une
mani�re d�appr�hender la FLUIDITE du mouvement.
1.5.3/ La
Volte au b�ton
La volte en canne permet de se d�placer et de ��sortir��
avec toutes les attaques (avec certes des degr�s de difficult�s diff�rents)
sans probl�me majeur d�appuis au sol. La volte en b�ton poss�de th�oriquement
les m�mes possibilit�s de d�placement. L�encombrement du b�ton restreint �galement
la facilit� d�ex�cutions de certains d�placements. La sortie de volte a moins
de degr�s de libert� dans les mouvements (les bras n�ont pas des mouvement
ind�pendants, ils ont perdu des degr�s de libert� avec le maintien � 2 mains du
b�ton). L�effet stabilisateur du bras libre en canne n�existe plus.
Encha�nements fluides :
-
Le pied arri�re passe
devant, le Kemisu s�impose facilement avec un lat�ral ext�rieur en sortie.
D�autres sorties peuvent �tre r�alis�es. Simplement elles ne sortent pas
naturellement dans la continuit� du mouvement avant m�me que le pied retombe au
sol
-
Le pied avant se d�place
d�abord, le lat�ral crois� avec une vrille du corps s�impose comme sortie
�vidente. L� aussi c�est le seul mouvement qui peut �tre anticip� avant m�me
que le pied retombe au sol.
Un encha�nement de mouvement fluide ne contrarie
pas la trajectoire g�n�rale du b�ton, le b�ton est simplement guid�. La
� sortie � d�un mouvement est l �� entr�e� de l�autre, leur
point commun est la trajectoire qui est voisine. Des appuis puissants ne sont
pas n�cessaires puisqu�il n�y a d�efforts important � appliquer au b�ton, on le
r�gle simplement.
Encha�nements avec force :
Pour les autres mouvements, la modification de
trajectoire impose des appuis puissants au sol pour appliquer les efforts
rectificatifs au b�ton. Le panel de mouvements fluides n�est donc plus si vaste
qu�en canne, � param�tre �gal. D�autres caract�ristiques li�es purement au
b�ton sont donc � utiliser dans la caisse � outils pour compenser ces
restrictions.
1.5.4/ Notions de force et
fluidit� : quantification (� venir)
1.6/ ANALYSE D�UN DEPLACEMENT PARTICULIER :
LA VOLTE �
La volte permet de modifier l�axe de combat, de modifier
la distance. La volte cache la ��sortie�� du canniste et permet de se tirer de
certains mauvais pas (jambes attaqu�e�). Elle est universellement connue dans
le monde des Arts Martiaux sous le terme de Tai Sabaki pour l�Aikido par
exemple. Comment fonctionne-t-elle ?
1.6.1/ Volte et Cin�matique du
point � trajectoire globale
Sur la base d�un grand cercle centr� sur
l�adversaire, le volteur d�crit un petit cercle sur ses appuis :
|
En marche avant : La trajectoire d�une volte sans changement
de main, en marche, avant donne une �picyclo�de ; la petite boucle (ou
le point de rebroussement) est dirig�e vers l�ext�rieur du cercle (idem pour
la volte sans changement de mai, marche avant).
|

|
|
En marche arri�re : La trajectoire d�une
volte sans changement de main, en marche arri�re, donne une hypocyclo�de
(Euleur & Steiner 1745); la petite boucle (ou le point de rebroussement)
est dirig�e vers l�int�rieur du cercle (type tympan de cath�drale).
|

|

1.6.2/ Mod�lisation de la volte
Hypoth�se de travail : Le canniste est en
garde (� gauche ou � droite), sa jambe arri�re est � 45� (135�) par rapport �
l�axe de combat. En position de garde, l��cartement entre ses 2 appuis est de
la largeur des �paules (Lep).
-
Le canniste a r�alis� au
maximum un tour complet sur lui-m�me � la fin de la volte (360 �)
-
Il est limit�
physiologiquement par la rotation qu�il peut effectuer sur un appui.
-
Lcompas est
la longueur du compas des 2 jambes, c'est-�-dire la longueur du pas de mouvement
o
2x Lcompas +Cste >
Discomb (Discomb=distance de combat) : si
la distance � l�adversaire est trop longue, la volte ne permet pas de rattraper
la distance pour attaquer.
o
Cste = longueur li�e � la
g�om�trie des membres de l�attaquant et de sa canne. C�est une constante
calibr�e.
Nous allons rechercher la zone d�atterrissage
finale de la volte selon la mani�re de l�engager et de la r�gler au cours de
l�ex�cution.
1.6.3/ -
1.6.4/ Volte sans changement de
main et zone de fonctionnement �
Le genou avant est l�axe de rotation de la premi�re
partie de la volte. 135� (90�+45�) semble la limite maxi de l�angle qui peut
�tre donn�e ce premier angle de r�glage. L�angle de la deuxi�me partie de la
volte fera au plus 225� (180�+ 45�). Si l�engagement de la volte (premier angle
de r�glage) est faible (petit angle de rotation), il sera n�cessaire de tourner
de mani�re plus importante lors de la 2�me partie de la volte
(deuxi�me angle de r�glage). La m�me contrainte physiologique li�e au genou du
deuxi�me appui va �tre rencontr�.
Les zones hors du cercle � zone de
rapprochement � sont �galement des zones de fonctionnement de la volte.
Elles permettent de s��loigner de l�adversaire.
Les zones
zR1 et zR2 sont des zones d�atterrissage ��r�gl�es��, des zones o� il est
possible � de mani�re simple � de se retrouver face � l�adversaire. Les zones
zS1 et zS2 sont des zones d�atterrissage de ��secours��, il y est difficile de
se recaler face � l�adversaire. N�anmoins
des attaques d�cal�es y sont possibles.
La zone de fonctionnement optimale est bien d�sax�e
par rapport � l�axe de combat. Le changement d�axe est bien une des raisons
d��tre de la volte. L�arriv�e rapide sur l�adversaire en est la deuxi�me
composante.
La zone de fonctionnement de la volte sans changement
de main en marche arri�re est relativement centr�e sur l�axe de combat. Le recul en ordre coh�rent est bien une des
raisons d��tre de cette volte. Elle permet �galement de changer l�axe de combat
de mani�re relativement efficace. Cette deuxi�me composante est bien souvent
ignor�e ; en effet cette zone de fonctionnement est tr�s �troite, donc
difficile � r�gler, elle n�est pas naturelle.
1.6.5/
Volte avec changement de main et zone de fonctionnement m
Le genou arri�re est l�axe de rotation de la premi�re
partie de la volte. 135� (90�+45�) semble la limite maxi de l�angle qui peut
�tre donn�e ce premier angle de r�glage. Le commentaire est identique au 1.6.2.
La zone de fonctionnement optimale est bien d�sax�e
par rapport � l�axe de combat. Le changement d�axe est bien une des raisons
d��tre de la volte. La zone de fonctionnement � distance constante de
l�adversaire est plus importante dans cette volte ; le changement d�axe de
combat en gardant une distance constante par rapport � l�adversaire est le
deuxi�me int�r�t de cette volte. L�arriv�e rapide sur l�adversaire en est la
troisi�me composante.
La zone de fonctionnement de la volte avec
changement de main en marche arri�re est fortement d�sax�e de l�axe de
combat. Le recul en d�saxant le combat
est une des raisons d��tre de cette volte.
1.6.6/
Modification de l�axe de combat �
Quel est l�angle maximum que l�on peut obtenir en
d�saxant le combat avec une volte (�tude qualitative estimative) ?
1er cas : L�adversaire est au-del�
de la distance parcourue par les 2 appuis (2xLcompas+cste) :
le d�saxage maximum sera voisin de 68� (angle th�orique 67,5�)
2�me cas : L�adversaire en en de��
de cette distance, l�angle maximum th�orique est de 180�. Donc, de mani�re
purement th�orique on peut attaquer l�adversaire sur tous les angles. Par
contre, il faut se rapprocher pour obtenir cet �ventail de possibilit�s.
Le besoin d�avoir un angle important et le besoin
d��tre � distance suffisante sont donc 2 param�tres de r�glage contradictoires.
Avoir une volte bien r�gl�e revient � optimiser ces 2 besoins. De mani�re
empirique ou pas, il est envisageable de trouver une fonction math�matique
reliant ces 2 param�tres et d�en maximiser ou minimiser le gain � chaque �tape.
1.6.7/
Synth�se des conclusion sur la volte �
Le d�placement par volte n�est pas naturel. Notre
cerveau a int�gr� tr�s t�t le d�placement en ligne droite mais les r�sultats de
d�placement par trajectoire circulaire ne sont pas connus, ils sont la plupart
du temps calcul�s (et ils n�cessitent donc un temps de r�action plus
long) ; lorsqu�il deviennent �vidents, le temps de calcul n�cessaire au cerveau
peut �tre employ� � d�autres t�ches�
La volte peut donc �tre � d�placement long ou �
trajectoire bris�e. La volte � d�placement long permet de r�guler l�axe et la
distance de combat de mani�re franche. La volte � trajectoire bris�e est riche pour se sortir
de situation difficile, notamment � faible distance. Le changement de main
(volte avec ou sans changement de main) n�est en fait q�un r�glage issu du
d�placement choisi.
1.7/
Autres d�placements : Bonds et sauts
Le bond permet de rentrer rapidement et de
mani�re rectiligne dans la zone de protection adverse (distance de touche), de
d�cocher le coup et de se mettre en s�curit� dans la foul�e. Il permet de
s��loigner tout aussi rapidement de la zone ou l�adversaire pouvait �galement
toucher (distance de vigilance ou
distance de r�cup�ration). L�adversaire subit une modification tr�s rapide
d�information (presque une rupture).
2/ STRATEGIE DE COMBAT [
La strat�gie du canniste vient de son �tat d�esprit,
de ses capacit�s, de son v�cu�
Quelques questions simples :
- O� se passe le combat ? Avec qui ?
- J�ai ma canne, je suis en garde, qu�est ce que je
fais avec mon adversaire qui est lui-m�me en garde ?
- Qu�est ce qu�un combat intelligent, une action construite ?
� Le geste est plus rapide que la pens�e �
Des
personnalit�s aussi diff�rentes que Maurice Sarry, Henri Plee, l�on dit et
�crit. La discipline de la Programmation Neuro linguistique (PNL) l�a d�montr�
� maintes reprises. La gestuelle devance l�analyse ; il s�av�re donc utile
d�avoir des r�ponses d�j� pr�par�es � des situations types. Ainsi c�est le
cerveau le plus rapide, le cerveau dit ��reptilien�� qui r�agit et non le
cerveau sup�rieur dit ��analytique��.
Nous allons donc maintenant nous int�resser aux automatismes
de combat. Mod�liser ces automatismes devrait permettre de trouver quelques
rouages de cette m�canique complexe et obscure.
2.1/ Tactique g�n�rale
La tactique du combattant d�pend des techniques
acquises, des ses possibilit�s physiques personnelles mais aussi de son
temp�rament. Une bonne tactique personnelle est en harmonie avec son
temp�rament offensif ou d�fensif.
2.1.1/ Guerre Eclair Versus
D�fense Contre-Attaque (G.E. vs D.C.A.)
Les actions ne peuvent �tre qu�actives ou
r�actives. Le mouvement actif comporte une notion de cr�ation d�intention d�o�
le concept de Guerre Eclair. L�action r�active est une protection face �
l�attaque adverse puis une contre-attaque d�o� le concept de D.C.A.
La tactique offensive (active � offensive / initiative)
� � G.E. �
-
Touche le plus possible +
Ne pas �tre touch� (��donner et ne point recevoir�� � Moli�re 1670)
-
Semble r�unir les
meilleurs chances de r�ussite : attaque pr�par�e + calcul�e (l�attaque
d�sordonn�e ne surprend qu�une fois)
-
Les d�placement et
attaques doivent �tre rapides + art des feintes
-
Cr�ation d�intention
La tactique d�fensive (r�active) � � D.C.A.
D�fense Contre-attaque �
-
D�fensive # passivit�
-
Ne pas �tre touch� + Toucher
-
Toucher avant d��tre
touch� (��zen non zen��)
-
Provoquer attaques
adversaires + parade-ripostes + esquives
-
Grande s�ret� de jugement
+ r�flexe + lucidit� + pr�cision du mouvement
-
Mobilit� dans le
d�placement
-
Tenir l�adversaire �
distance
2.1.2/ Analyse de l�adversaire /
d�crypter le jeu adverse : Le SAVOIR-FAIRE du canniste
Analyser l�adversaire revient � extraire des
informations de l�adversaire.
-
Quelles informations
trouver chez l�adversaire ?
-
Trouver les informations
pertinentes pendant un tr�s court instant, et r�p�ter cette analyse tout au
long du combat.
-
Comment trouver ces
informations ?
-
Que retirer de ces
informations et comment r�agir en cons�quence ?
-
Qu�est ce qu�on en retire
pour le combat : savoir trouver LA bonne action associ�e
D�crypter le jeu adverse c�est :
-
D�celer ses forces et ses
faiblesses : c'est-�-dire ce qu�il r�alise bien (il ne faut pas l�amener �
faire �a !), ce qu�il r�alise mal (il faut l�amener � faire �a !), ce
qu�il ne fait pas (comment en tirer parti ? extraire le compl�mentaire de
qu�il fait).
-
Cela revient � m�moriser
les informations pertinentes � diff�rents instants du combat et � en retirer
une loi de comportement (extracteur, synth�tiseur).
-
Comment en tirer
parti ?
-
Adapter sa technique � la
morphologie de l�adversaire
-
Savoir saisir LE bon
moment pour l�action : timing
1�re constatation : une
� R�action � � est plus facile � analyser (concept de DCA D�fense
Contre Attaque).
|
R�action
� un �tat existant
|
R�action
� un mouvement
|
|
Position
g�n�rale de l�adversaire (a)
|
Mouvement
g�n�rale de l�adversaire (a)
|
|
Position
de la canne (b)
Position
des �paules (b�)
|
Position
modifi�e de la canne (b)
Position
modif�e des �paules (b�)
|
|
Position
des jambes (c)
Mouvement
des jambes (c�)
|
|
2.1.3/ Comment traiter
l�information ?
Le traitement universel de
l�information doit :
-
1/ mettre l�information
dans un cadre c'est-�-dire la � d�bruiter �, la � lisser �,
c.�.d. l��purer, mais aussi de classifier, de structurer, de r�sumer
l�information, de la pr�senter sous forme synth�tique
-
2/ la stocker, la
retrouver
-
3/ exploiter l�information
dans une perspective de d�cision et d�action
-
2.2/ Strat�gie - les fils
directeurs d�un combat � notion de loi de comportement
-
1er fil
directeur : Contrer - parade/esquive + riposte
-
2�me fil
directeur : Cr�er de l�incertitude (voir �galement notion de feinte,
� d�but de �). Va-t-il sortir en haut ou en bas, � gauche ou �
droite ?
-
3�me fil
directeur : G�rer la notion d�habitus ou d� anti-incertitude. Installer un
encha�nement avec une sortie et lorsque l�habitude est enregistr�e chez
l�adversaire, sortir avec une autre attaque.
-
4�me fil
directeur : Feinter. Donne un effet d�annonce � un mouvement et feinter le
mouvement (fausse information)
-
5�me fil
directeur : Changement de rythmes -
vitesse lente, acc�l�ration
-
6�me fil
directeur : D�placement tactique � modifier l�axer de combat
-
7�me fil
directeur : Anticiper la r�ponse sur une action pr�visionnelle de
l�adversaire (prise de risque)
-
8�me fil
directeur : D�sorganiser l�adversaire - Emp�cher l�adversaire de
s�exprimer (casser ses encha�nements)
o
Le top du top :
D�sorganiser adversaire : dans ses mouvements + dans sa t�te
�
Instabilit� :
perte de lucidit�/mouvement d�humeur, h�sitations, �vitement du combat
�
Incoordination :
surexcitation � pr�cipitation / inhibition � scl�rose attaque/d�fense
�
Gestion du positionnement
dans l�aire de combat : position privil�gi�e au centre, provoquer sortie
d�aire
�
Cr�er des ouvertures et
des failles�
Ces lois de comportement peuvent s�imbriquer les
unes dans les autres. Nous allons tenter de trouver comment parvenir � mettre
en �uvre ces fils directeurs (m�thodes, algorithmes, modes de combat�).
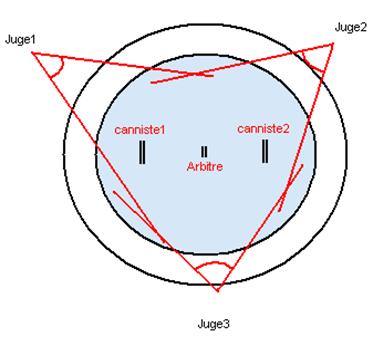
2.3./ Un point essentiel : la g�om�trie de l�aire
de combat �
La strat�gie d�un combat est g�n�ralement li�e au
lieu du combat. Il n�en est pas de m�me en canne de combat, le lieu de combat
est neutre, reproduits � l�identique, c�est un param�tre fixe.
L�aire de combat circulaire implique une notion de
d�placement dans 2 dimensions (et non pas dans une dimension comme en fleuret
par exemple) et dans un espace restreint circulaire.
(Source Site
Web de la R�union - Canne-reunion.com � Merci � Olivier Sabban)
2.3.1/ Pourquoi
se d�place-t-on ?
But : -
Maintenir la distance de combat par rapport � l�adversaire : mode r�actif
- suivi de la trajectoire de l�adversaire
- Cr�er la distance
souhait�e : une distance est choisie comme consigne selon le besoin d�une
des 3 distances de confrontation (touche, vigilance et r�cup�ration) : mode
actif - cr�ation d�une trajectoire pour une action � venir
- D�calage : casser
et d�placer l�axe de combat
=> Automatisme de suivi de l�adversaire
2.3.2/ Comment
se d�place-t-on ?
-
D�placement court :
un pas en avant (naturel) / un pas en arri�re (naturel) / un pas chass� (� acqu�rir)
-
D�placement long : le
fente avant / la fente arri�re / la volte (les 3 sont � acqu�rir)
(rep�re
othogonal)
De mani�re naturelle, le d�placement est analys� suivant
un logique lin�aire et cart�sienne suivant un d�placement relatif en ligne
droite par rapport � l�adversaire (rep�re othogonal). Ce 1er mode
d�approche utilise les 2 cannistes comme r�f�rentiels relatifs. La volte est
dans ce syst�me de r�f�rentiel un d�placement par rapport � l�adversaire
(rep�re polaire ou angulaire).
==> Automatisme de d�placements associ� aux
mouvements ou aux encha�nements
2.3.3/ Pourquoi
un cercle � pourquoi pas un carr� ou un rectangle comme en Boxe Fran�aise ?
Nota : La question ne se posait
� l�origine car la canne �tait pratiqu�e dans le ring de Boxe Fran�aise. Elle
l�est d�ailleurs toujours lors d�exhibitions.
Le rectangle :
Les sports de combat pied-poing utilisent des attaques circulaires ET des
attaques directes, lin�aires et droites. La canne n�utilise aucune attaque
droite (les piques sont interdits). Dans le cercle inscrit dans le rectangle
(ou plut�t les 2 cercles li�s entre eux comme un hippodrome) la panoplie
compl�te des mouvements peut �tre utilis�e. Dans un coin, il manque des outils
(le contre-attaque en pique) pour se sortir du cul-de-sac.
Le cercle : Toute la surface
peut �tre utilis�e par les cannistes avec leurs attaques de canne, toutes �
base de rotation.
Le cercle permet d�utiliser la volte sur toute la surface
de l�aire de combat par exemple.
2.3.4/ Le
cercle : qu�impose t-il � quelles sont ses contraintes associ�es ?
-
En mati�re de d�placement :
en d�autres termes comment se d�placer avec des segments de droite lin�aire
dans un syst�me angulaire, le cercle (rep�re polaire) ?
Changeons de syst�me de
r�f�rentiel. Prenons un autre rep�re relatif, la canne des canniste.
o
La volte sans changement
devient une rotation simple par rapport � la canne
o
Les d�placements
deviennent des �vitements et des rotations par rapport � la canne adversaire ou
par rapport au point de contact entre les 2 cannes.
-
En mati�re de distance :
o
Les distances sont born�es
o
Tous les points sont
accessibles avec une �nergie similaire
3/ AUTOMATISMES DE COMBAT
La tactique de combat et la strat�gie peuvent �tre
abord�s sous plusieurs angles.
Dans son carnet 10 (chapitre A.7) le CNCCB aborde la tactique de combat avec la
notion d�adaptation au combat (1er degr�) et la notion de d�sadaptation
(2�me degr�).
La notion habituelle d�adaptation regroupe des
concepts vari�s. Au sens de l�Intelligence Artificielle (I.A.) l�adaptation est
un process r�actif qui poss�de des capacit�s � raisonner et � apprendre.
La notion de syst�me collaboratif �l�ve le niveau
de cette adaptation ; le canniste travaille avant tout avec un partenaire.
La notion d�anticipation vient compl�ter l� � intelligence � du
combat. Ces notions peuvent s�apparenter � la d�sadaptation.
Nous vous proposons un deuxi�me point d�entr� pour
appr�hender cette vaste science qu�est tout simplement �l�art de la guerre� vu cette
fois-ci par l��il de l�automaticien.
Dans les 2 approches, le facteur commun de
classement est l� � anticipation �, la pr�diction du
comportement adverse. Plus l� � anticipation � / pr�diction est
pr�sente plus le niveau utilis� par le combattant est �lev�.
Nota : Dans la hi�rarchie
des automatismes, l�automatisme � pr�dictif � est un des plus �volu� et un des plus d�licat �
r�gler �galement.
Le ��coin
du sp�cialiste�� regroupe des notions plus abstraites, utiles pour mod�liser les diff�rentes m�thodes
de combat sur des calculateurs.
3.1/ Le point de vue d�un
automaticien
3.1.1/ Le temps de r�action6
Temps de r�action de l�attaqu� (tr) = temps acquisition information + temps analyse et recherche
r�ponse + temps
execution
Temps de r�action de l�attaqu� < Temps disponible
avant impact (td)
|
0 (d�but mouvement attaquant) >>
|
>> >> >> impact
|
Game over
|
|
< < < < < Temps disponible d�termin�
par l�adversaire > > > >
>
|
|
|
Temps de r�action d�termin� par l�attaqu�
|
|
|
|
temps acquisition information
|
temps analyse et
recherche r�ponse
|
|
|
|
|
|
|
|
|
|
(1)
|
temps de r�action ok : la r�ponse arrive
juste avant l�impact
|
|
|
|
|
temps execution
|
|
ok
|
|
|
|
|
|
|
(2)
|
|
temps execution trop
long
|
|
|
|
|
|
|
|
|
|
|
(3) temps acquisition
information trop long
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4)
|
temps analyse et recherche
r�ponse trop long
|
|
|
|
|
|
|
|
|
|
|
|
(5) temps de r�action trop rapide : l�adversaire
peut modifier son attaque
|
|
|
|
|
|
|
temps bonnus
|
Super !
|
|
|
|
|
|
|
|
|
|
|
3.1.1.1/ Analyse du temps
de r�action
(2 : temps d�execution trop long) :
am�liorer la ma�trise technique et les qualit�s physiques
(3 :temps acquissions information) :
apprentissage de la ��lecture�� des intentions de l�adversaire
(4: temps analyse et recherche r�ponse) : apprentissage du geste en riposte (incertitude :
lequel ?)
(5 : temps bonnus) :
2 interpr�tations possibles
-
l�adversaire peut modifier
son attaque (changer d�avis)
-
le temps de r�action tr�s
rapide doit permettre d��laborer une contre-attaque plus construite, des
mouvements plus �labor�s, plus lent/plus difficiles � r�aliser - voire de
penser � la suite du combat avec le temps bonnus ainsi r�cup�r�.
3.1.1.2/ Comment optimiser
le temps de r�action ?
La formule magique bien connue [Vitesse
=Distance/temps] donne [Temps=Distance/vitesse]
Donc pour avoir un temps de r�ponse faible on doit
avoir : une VITESSE ELEVEE ET/OU une DISTANCE FAIBLE
� mettre en �uvre !
La distance faible s�appelle l�ESQUIVE.
L�esquive annule toute la suite de la cha�ne d�automatisme de combat. L�adversaire
doit recommencer � z�ro. Energ�tiquement parlant c�est le meilleur
automatisme !
� sup�rieur de la canne : utilit� ici :
sinon l�esquive ne fonctionnerait pas.
Qu�est ce qu�un bon temps de r�action ? - appel� aussi � adapt� �
Si la parade arrive trop t�t, l�adversaire peut
modifier son attaque (changer d�avis). Si elle arrive trop tard, on prend
l�impact.
Remarque N�1 :
on retrouve ici l�utilit� de la frappe avec l�extr�mit� de la canne (dernier
quart�). En effet si la frappe est r�alis�e trop pr�s, l�esquive ne sera pas op�rante,
le d�placement devra �tre trop important pour esquiver. Le jeu s�en trouve
amoindri.
3.1.1.3/ La ��pression��
du temps : initiative / attente
- Attentiste, le combattant est soumis au Temps
Disponible impos� par l�adversaire : TD
- L�initiative donne au du temps suppl�mentaire
(TS) au combattant pour organiser SON attaque ; Ce temps suppl�mentaire
(TS) se cumule au temps disponible (TD) qu�il impose alors : TS + TD
En terme humain, la pression psychologique est
moins forte ; en terme d�automatisme un temps de calcul suppl�mentaire est
donn� au calculateur du combattant.
3.1.2/ L�acc�l�ration
Avec l�op�ration math�matique de la d�riv�e, la
formule magique de la vitesse donne l�acc�l�ration. L�acc�l�ration permet de rendre
caduque le calcul que fait �galement l�adversaire. En arrivant plus t�t, le pr�dicteur
de trajectoire de l�adversaire est fauss�.
L�acc�l�ration n�gative (le freinage) se rapproche
de la feinte ; le calcul lin�aire de trajectoire de l�adversaire est
�galement fauss�.
On voit d�j� qu�avec 2 calculs �l�mentaires on
r�cup�re d�j� quelques informations majeures.
- L�acc�l�ration redonne du temps
suppl�mentaire, un autre TS (voir
ci-dessus ��La ��pression �� du temps��).
- L�acc�l�ration donne une rupture dans
l�acquisition de l�information par l�adversaire : L�adversaire ne capte
plus d�information ��fiable��.
- Il fausse les autres pr�dictions lin�aires.
Le changement de rythme a donc des vertus
multiples.
3.1.3/ Les
niveaux de complexit� des automatismes
3.1.3.1/ Les fonctions utiles en combat
L�automatisme doit choisir une ou des actions parmi
les parades, les attaques ou/et les d�placements. Le choix de la parade est un
automatisme bien particulier, instinctif (� fonction parade=(x) �
soit un �l�ment � choisir la parade). Le choix de l�attaque ou du d�placement
est plus complexe (� fonction attaque & d�placement=(y,z) soit 2
�l�ments � choisi une attaque et �ventuellement un d�placement).
3.1.3.2/ L�automatisation des choix
Les derni�res recherches en mati�re d�Intelligence
Artificielle ont montr� que les syst�mes ��experts��, centralisant toutes les
informations avaient des difficult�s � prendre une d�cision rapidement. En
effet la multitude d�informations � traiter et les algorithmes toujours plus
complexes pour prendre en compte la richesse de la r�alit� nous �loignent du but initial de rapidit�.
Dans ses c�l�bres ��chroniques martiales ��,
�Henri Plee a propos� les notions de
cerveau intelligent et de cerveau primaire dit ��cerveau reptilien��. D�autres
processus plus primaires g�rent nos automatismes de base (r�gulation thermique,
r�gulation cardiaque�). Le r�gulateur cardiaque est c�bl� de mani�re autonome
(via l�ortho- et le parasympathique), la boucle de r�gulation est ind�pendante
des autres et elle fonctionne sur un r�seau de transmission qui lui est propre
(d�apr�s mes vagues souvenirs scolaires).
Nous rechercherons donc � mod�liser les
automatismes de combat par grande fonction � r�aliser durant le combat.
On distingue 3 niveaux de �complexit� et de qualit�
en mati�re d�automatisme :
-
le niveau
basique (mode 1) : appel� ��AUTOMATISME SANS MEMOIRE DE COMBAT�� ou
��signal-r�ponse�� " (m�moire imm�diate sans
capitalisation d�information) � voir 3.2
Le coin
du sp�cialiste :
L�automatisme
signal-r�ponse est un � mod�le de
Markov � simplifi�. Le processus de d�cision est dit ��markovien�� :
la r�ponse (l�encha�nement de mouvements)
est choisie en fonction d�un signal (stimulus) et d�une r�compense
esp�r�e (la touche � un endroit calcul�). On parle �galement
d� � agent r�actif �. Cet agent r�actif pr�voir un coup �
l�avance (une pr�diction � un pas) :
Si (stimulus)
Et Si
l�action est (d�but de l�encha�nement)
Alors au pas
suivant (fin de l�encha�nement) : la touche est r�alis�e.
Selon le
mod�le de Rasmussen, le niveau bas� sur les connaissances est le niveau K
(Knowledge-Based Behavior). La proc�dure est contr�l�e par des buts. Le
m�canisme de d�cision est connu. Si la situation est inhabituelle,
exceptionnelle ou inconnue, il n�y a pas de r�ponse adapt�e. Cependant
contrairement au mod�le th�orique, ici il n�y a pas d�apprentissage possible.
-
le niveau
sup�rieur (mode 2) : appel� ��AUTOMATISME AVEC MEMOIRE DE COMBAT�� ou ��pr�dictif��<
m�morisation du dernier
encha�nement associ� au r�sultat (touch�, pas touch�) � capitalisation d�exp�rience
voir
3.4
Le coin
du sp�cialiste : Le mod�le de
Markov complet m�morise les r�sultats et recherche le meilleur chemin. Il trouve
ici ses limites. L�agent est ���adapt钒. L�apprentissage modifie la
probabilit� de d�clanchement d�une r�ponse. Eliminer les moins bons
encha�nements appauvris l�incertitude � donner � l�adversaire. De plus il
n�int�gre pas la notion d�habitude, process purement humain.
Process de
d�cision Markovien :
Rn
= R�actionn = Fonction (stimulusn-1) <==> agent
r�actif
� Si F(Rn ,(stimulusn-1))
>0 : le r�sultat de la R�action donne une r�compense (une touche)
� Si F(Rn ,(stimulusn-1))
<0 : le r�sultat de la R�action donne une punition (un encha�nement fatiguant
pour rien)
Selon le
mod�le de Rasmussen, le niveau bas� sur les r�gles est le niveau R (Rule-Based Behavior). La proc�dure est contr�l�e par des r�gles
intuitives. Les proc�dures sont acquises par l�apprentissage. La situation est
famili�re (sans impr�vu)
-
le niveau
expert (mode 3) : appel� ��AUTOMATISME AVEC ACQUIS DU COMBAT�� ou
��combat intelligent�� >
voir
3.5
o
Recherche des lois de
comportement de l�adversaire
o
Capitalisation des
informations du combat : encha�nements des 2 adversaires, taux de r�ussite/�chec �
coupl� avec analyse probabilit� et pr�diction.
o
Recherche d�une liste d�encha�nements
� r�aliser pour toucher l�adversaire
Le coin
du sp�cialiste : La recherche de la
loi de comportement est une notion fondamentalement diff�rente de la
��recherche du meilleur chemin�� avec le mod�le de Markov. La capacit� �
g�n�raliser et � inscrire des r�gularit�s observ�es
(ind�pendante du temps) donne un ��Agent adaptatif��. La notion d��tat interne permet de trouver un
mode de combat en fonction de la situation, ce qui est pertinent pour d�cider
de son action n�est pas directement observable.
Un
couplage avec le mod�le d�apprentissage � g�n�tique � est � pr�voir
pour l�acquisition du savoir.
Nota
sur les mod�les KRS de Rasmussen :
Le d�coupage des mod�les KRS ne
correspond pas exactement � nos cas d��tude. Ils sont moins adapt�s que les
mod�les de Markov.
3.1.4/ Les
autres automatismes utilis�s pendant le combat
Plusieurs automatismes fonctionnent en m�me temps
pour r�guler chacun des fonctions n�cessaires au combat. En voici les
principaux (automatisme de calcul de touche, automatisme de suivi de
l�adversaire, automatisme de repli et de protection du partenaire, automatisme
de recherche de faille, automatisme de gestion de la simultan�it�)
3.1.4.1 Automatisme de
calcul de touche � Quelques id�es
A ce jour, le d�compte des touches reste l��l�ment
le plus difficile � g�rer lors d�un combat de canne. En effet, 6 conditions
doivent �tre remplies pour que la touche soit valable. Analysons les en d�tail.
� Le coup doit �tre arm� (1)
Le
mouvement de l�attaque doit passer dans un plan en arri�re de celui de la
colonne vert�brale (plan perpendiculaire � l�axe de combat). Au sens
cin�matique, la trajectoire d�attaque est en 2 phases, la phase arm�e (l�arm�e
derri�re le plan de la colonne) et la
phase offensive en elle-m�me. Le point de rebroussement de la trajectoire
amorce la phase offensive.
-
sur le lat�ral ext�rieur : Le point de
rebroussement caract�ristique est le coude. L�analyse de la trajectoire du point
��coude�� doit permettre de d�tecter si oui ou non il y a arm�.
o
Un marqueur sur le coude doit permettre de
r�cup�rer l�information plus facilement
o
L�analyse de la trajectoire est une analyse 3D,
l��il humain reste tr�s performant dans ce domaine
-
sur le lat�ral crois� : Le point de
rebroussement caract�ristique est la manchette de la canne. L�analyse de la
trajectoire du point ��extr�mit� de la manchette�� doit permettre de d�tecter
si oui ou non il y a arm�.
o
Un marqueur sur la manchette doit permettre de
r�cup�rer l�information plus facilement
o
L�analyse de la trajectoire est une analyse 3D qui
n�cessite plus qu�une reconnaissance de forme ; le changement de
direction de la trajectoire est un
calcul de variation d��tat du point singulier. Cette calculatoire est
certainement l�une des plus gourmande en ressource car il y a changement de
trajectoire. L��il humain reste tr�s performant dans ce domaine.
La trajectoire de l�arm� du lat�ral ext�rieur et du
lat�ral crois� interceptent le plan en arri�re de celui de la colonne
vert�brale. Donc s�il on cr�� un faisceau mat�rialisant ce plan vertical (par
des infra-rouges, du laser, de la d�tection de pr�sence�) et que ce faisceau est coup�, il le sera par
un arm� � sous r�serve que ce faisceau mat�rialise un demi plan situ� au dessus
de la ligne des �paules.
-
sur le bris� : Le point de
rebroussement caract�ristique est le coude. L�analyse de la trajectoire du
point ��coude�� doit permettre de d�tecter si oui ou non il y a arm�.
o
Un marqueur sur le coude doit permettre de
r�cup�rer l�information plus facilement
o
L�analyse de la trajectoire est une analyse 3D,
l��il humain reste tr�s performant dans ce domaine
-
sur le crois� t�te : Le point de
rebroussement caract�ristique est �galement le coude. L�analyse de la
trajectoire du point ��coude�� doit permettre de d�tecter si oui ou non il y a
arm�.
o
Un marqueur sur le coude doit permettre de
r�cup�rer l�information plus facilement
o
L�analyse de la trajectoire est une analyse 3D,
l��il humain reste tr�s performant dans ce domaine
Le bris� et le crois� t�te interceptent, eux, un
demi plan inf�rieur � la ligne des �paules. Cependant, une garde proche de la
hanche va �galement intercepter ce demi-plan. Avec ce mode op�ratoire pour les
attaques verticales on obtiendra un nombre plus important de faux arm�s.
-
sur le crois� bas : L�amplitude du
mouvement est donn�e par l�extr�mit� de la canne (l�extr�mit� de touche de la canne, le ��bout
de canne��). L�analyse de l�amplitude de la trajectoire du point ��bout de
canne�� doit permettre de d�tecter si oui ou non il y a arm�.
o
Un marqueur sur le ��bout de la canne�� diff�rent
de celui de la manchette doit permettre de r�cup�rer l�information plus
facilement
o
L�analyse de la trajectoire est une analyse 3D,
l��il humain reste tr�s performant dans ce domaine
Le crois� bas et l�enlev� ne permettent d�analyse
de plans de mani�re simple.
G�n�rer
un plan virtuel impose de placer le g�n�rateur de plan dans le dos du canniste
et de le fixer afin que sa position par rapport au canniste soit fixe. La tenue
du canniste est souple. C�est une difficult� de mise en �uvre non n�gligeable.
� La touche est franche et nette (2)
Quels
sont les param�tres d�une touche franche et nette ?
-
une trajectoire dans un plan et non inscrit dans
une surface gauche
-
pas de changement de trajectoire en cours de
mouvement, pas d��cart al�atoire ou de vibration de la trajectoire
o
L�analyse de la trajectoire est une analyse 3D,
cette notion est �galement d�licate � analyser. L��il humain reste tr�s
performant dans ce domaine
� La canne est dans le prolongement du bras
(3)
Si le
coup est arm�, on a donc un segment de droite d�une longueur approximative de 2
fois la longueur de la canne, on doit avoir un mouvement � peu pr�s acad�mique
� le coup n�est pas sabr� (4)
Si
le coup est arm�, on a donc un segment de droite d�une longueur approximative
de 2 fois la longueur de la canne, on doit avoir un mouvement � peu pr�s
acad�mique
(3)
et (4) sont associ�s. Les 2 notions de ��prolongement du bras�� et de ��sabr钒
sont jouxt�s et s�analysent de mani�re sensiblement identiques. La somme des 2
contraintes impose la rectitude de la longueur dans 2 plans diff�rents (on peut
avoir une courbe ou un bris� dan un plan, en regardant sur la tranche du plan
on ne voit q�une droite
� Le coup est port� avec le quart sup�rieur
de la canne (5)
-
il faut quelque chose sur le dernier quart de la
canne qui valide le contact ou qui r�agit � la pression (et qui r�agit
rapidement)
-
il faut de plus que ce quelque chose r�agisse
uniquement sur une zone autoris�e
� La canne frappe sur une partie autoris�e
(6)
La
frappe est un contact avec des caract�ristiques physiques bien sp�cifiques. Les
contacts sont diff�rents suivant les zones de touches.
(5)
et (6) sont associ�s.
Quelles
natures de contacts possibles
-
Contact canne/face avant du masques : contact
bois/acier, sec, avec un tr�s l�ger amorti (le cou fait office de silent-bloc)
+ un bruit sec - 1er type de contact
-
Contact canne/faces lat�rales du masque :
contact bois/tissus molletonn�, bruit plus amorti et plus rond (l�acier est encore derri�re) -
2�me type de contact
-
Contact canne/flanc : contact bois/tissus
molletonn�, bruit plus rond (3�me type de contact)
-
Contact canne/jambe avant : contact
bois/tissus molletonn�, bruit plus rond (3�me type de contact)
-
Contact canne/canne : contact bois/bois, tr�s
sec, sans amorti + g�n�ralement � volume de d�cibel assez �lev� - lors de
parades (4�me type de contact).
-
Contact canne/adversaire : proscrit mais peu
exister.
Nota sur l�information auditive : le bruit sur un v�tement matelass�
ou sur un casque est diff�rent d�un bruit sur une autre canne : c�est �
priori une information sp�cifique diff�rente du bruit ambiant. La r�verb�ration
du bruit dans certains gymnases n�cessite un filtre d��limination de l��cho du
bruit mais le filtre ne doit pas ���liminer�� les s�ries rapides.
Qu�est ce qu�un contact (un coup) ?
-
Contact rapide (plus ou moins appuy� suivant les
cannistes)
-
Pression rapide
-
Bruit (4 types de bruits)
-
Vibration (capteur d�effraction de vitrine ?)
-
Frottement
==> chaleur (rarement et tr�s bref)
Comment d�tecter le contact ?
-
R�agir au contact Tout Ou Rien
-
R�agir � la pr�sence de la canne sur la surface
autoris� (ou de la surface autoris�e sur la canne) : chimie, �lectrostatique ?
-
R�agir � la vibration induite par le coup
Autres �l�ments de r�ponse
-
Amplifier le bruit du contact : un micro avec
filtre et n�amplifiant qu�un certain type de bruit, les autres ne sont pas
amplifi�s. Analyse spectrale automatique (calibration) du bruit. Pourquoi
pas : s�il est bien calibr�, le
syst�me n�est pas tr�s difficile � mettre en �uvre (1 micro embarqu� par
canniste ou 1 micro � proximit� de l�aire de combat + 1 analyseur).
-
Augmenter la visualisation du contact : Sur les 2 �l�ments
entrant en contact, la zone d�un des 2 �l�ments ��r�agit�� : elle change de couleur, �met un flash, un arc
�lectrique�
o
Chimie, �lectrostatique ?
-
Signaler le contact : probl�me de la
continuit� des contacts �lectriques avec une source d��nergie : se renseigner
aupr�s de la F�d�ration Fran�aise d�Escrime sur les progr�s en mati�re de
contact �lectrique pour leurs tireurs.
-
Signaler la force d�impact (effort) : Lors de l�impact,
la canne subit un effort bref et donc une flexion : jauge de contraintes
sur la canne sur le � sup�rieur donnent alors l�information de contact (contre
une autre canne �galement)
o
Une jauge de contrainte qui change de couleur en
��travaillant�� et qui r�siste aux impacts, si elle existe.
Id�es compliqu�es
-
grillage m�tallique fix� sur les parties � toucher
(lat�ral casque, flanc, jambe) maintenu par du scratch+ grillage m�tallique
fix� sur le dernier quart de la canne (ou tissu avec trame conductrice)
o
Liaison filaire entre tous les �l�ments grillag�s
Question : Peut-on trouver un capteur qui
r�agisse quand on modifie les caract�ristiques physiques du maillage (la canne
rajoute une caract�ristique physique au maillage d�j� r�alis� ? Si ce
capteur existe c�est LA solution au comptage.
-
D�tecteur une proximit�
tr�s tr�s imm�diate (infinie) : capteur de proximit� � sa limite de
fonctionnement
o
D�tecteur d�arr�t-marche des pompes �
carburant : un aimant pr�sent dans une cavit� est d�plac�, d�vi� par la
pr�sence m�tallique :
�
Int�r�t : pas d��nergie embarqu�e � contact
ouvert/ferm� simplement
�
Inconv�nient : n�est pas omnidirectionnel, et
quel est son temps de r�action ?
o
D�tecteur classique de proximit� : Probl�me de
filerie et d��nergie embarqu�e
-
Utilisation de l��lectricit� statique (avec une
canne d�une autre nature ?) pour cr�er un arc visible
-
D�tecteur la force du
contact : difficile de mette des capteurs de pression sur toute les
surfaces de touche.
Pour les attaques en fente :
o
La hauteur de l�impact par rapport au sol et par
rapport � la hauteur de l�adversaire est la premi�re indication de validit�.
Petite synth�se : 2 axes de d�veloppement pour calculer les
touches
-
augmenter la visibilit� des
crit�res de jugement (la visibilit� du contact) : marqueurs sur les ��points
de rebroussement�� et sur les points extr�mes
peu on�reux et facile �
mettre en �uvre
-
d�tecter de mani�re
automatique le contact de la canne sur les zones de touche
n�cessite de la
technologie de pointe.
-
Analyse de
bruit d�impact : Cela semble une piste s�rieuse et simple � mettre en
�uvre sur le terrain (r�glage et mise en service complexe)
-
Capteur de modification de
quantit� de surface m�tallique : Si un capteur fonctionnant sur ce mode
existe c�est LA solution. Le manque de capteur (ou la m�connaissance de
l�existence de ce type de capteur) pour le contact rend cette automatisation
complexe.
-
Des recherches sur les
fabricants de capteur r�soudront peut-�tre le probl�me ?
Premiers �l�ments de cahier des charges pour un
syst�me de calcul automatique de touche
-
pas de c�ble entre le
canniste et un calculateur (cause volte !)
-
le syst�me embarqu� sur le
canniste doit �tre l�ger
-
S�il est int�gr� � la
tenue, il ne doit pas co�ter cher et �tre lavable
-
S�il est rajout� � la
tenue : il doit l��tre rapidement et facilement
-
Il ne doit pas se d�chirer
ou se d�truire par contact violent.
3.1.4.2/ Automatisme de
suivi de l�adversaire
Les notions de trajectoire de l�adversaire et de
trajectoire d�impact de la canne sont tr�s voisines.
Suivre l�adversaire implique de r�agir � la
modification de distance et de direction.
Simplifions l�approche et prenons pour hypoth�se
que la vitesse des 2 cannistes est identique et qu�un canniste se d�place en
ligne droite. La trajectoire du 2�me canniste est bien connue des
math�maticiens ; BOUGUER (1732) a �tudi� cette courbe de trajectoire r�active
� la courbe de poursuite ou courbe du chien �. Le ma�tre avance
en ligne droite et son chien le suit � la m�me vitesse ; � tout instant le
chien corrige sa position pour retrouver toujours en direction du ma�tre, au
final le chien se retrouve sur la m�me trajectoire que son ma�tre en ligne
droite. Cette courbe math�matique est ���transcendante�� (4*y=a*x�-Log(x).
Poleni (1729) a �tudi� lui la � courbe des
for�ats �. La distance entre le suiveur et le suivi est fixe (la cha�ne
des for�ats ou ici la distance efficace de touche). Cette courbe est �galement
li�e au changement d�axe de combat. Elle est �galement ��transcendante�� (X= a
-2Th(a) et
y=2/ch(a) ).
Les 2 courbes de trajectoire, sont donc peu simples
� manier en calculatoire. Le c�t� ��transcendant�� explique la sensation
empirique du suivi de l�adversaire. Habituellement nos rep�res sont
essentiellement lin�aires et proportionnels.
Au-del� de la notion de trajectoire r�active, on
retrouve la trajectoire estim�e, pr�dictive. C�est balistique traditionnelle
dynamique d�interception.
De mani�re analytique, que regroupe l�automatisme
de suivi de l�adversaire ?
G�rer
les 3 distances de confrontation ?
o
distance de touche (DisT) : touches possibles ==> parade/riposte �
avoir pr�sent en m�moire imm�diate
�
Distance
de touche pour l�attaqu� Dist2 : une valeur constante connue
�
Distance
de touche pour l�attaquant Dist1 :une valeur non connue � priori � �valuer, �
estimer avant le combat.
�
La plus part du temps, par simplification, les 2 distances sont
estim�es identiques (Dist2=Dist1) et pourtant ils peuvent d�av�rer des param�tres de
r�glage de tout premier choix
o
distance de vigilances (DisV) : touche possible avec un
encha�nement/d�placement simple �
distance de ��cr�ation�� d�action ; c�est la seule distance ou l�on
peut �laborer une tactique.
o
distance de r�cup�ration (DisR) : un
combattant a ��rompu la distance� pour se mettre ��hors distance�� � toute
cr�ation d�action sera ��annonc�e��
o
Voir �galement 3.6.2.3
o
Info Dis : distance � un instant t du combat
Comment se d�placer ?
o
D�placement court (DisC) : un pas en avant (naturel) / un pas en
arri�re (naturel) / un pas chass� (� acqu�rir)
o
D�placement long (DisL) : le fente avant / la fente arri�re /
la volte (les 3 sont � acqu�rir)
Comment utiliser ces
param�tres ?
o
Info Dis - DisC < DisT : touches possibles avec d�placement court
o
Info Dis - DisL < DisT : touches possibles avec d�placement long
o
DisT
< Info Dis - DisL<
DisR : Temps disponible avant
attaque adverse - �laboration d�un ensemble d�attaque � court terme
o
DisR
< Info Dis - DisL :Temps
disponible avant attaque adverse - �laboration d�un ensemble d�attaque et/ ou
d�un plan de bataille � moyen terme
Strat�gie offensive de
d�placement
o
Voir 3.6.2.3 :
quadrant des positions de l�adversaire
R�glage de la distance
o
La fente permet 3 r�glages
de distance et 1 r�glage de l�angle d�attaque :
�
1 distance longue : fente
avant en avan�ant le pied
�
1 distance courte : fente
avant sur place en reculant le pied
�
1 distance n�gative
(recul) : fente arri�re
�
Position du pied par rapport
� l�axe de combat donne le r�glage angulaire
Une fois la fente engag�e,
le r�glage angulaire est effectu� et la distance est call�e : aucun
r�glage n�est plus possible.
o
La volte permet 2 r�glages
de la longueur d�attaque ainsi que 2 r�glages de l�angle d�attaque soit 4
points de r�glage possibles!
Maintien dans l�aire de
combat:
Dans cette notion de
��Suivi de l�adversaire�� on retrouve un deuxi�me automatisme imbriqu� : Le
��suivi de l�adversaire�� est intimement associ� au ��Maintien dans l�aire de
combat��
o
Le choix de d�placement
est autoris� hors du premier cercle en mode d�fensif
o
Le choix de d�placement
hors du premier cercle doit �tre modifi� en mode offensif.
Eviter le t�lescopage de
l�adversaire:
Cet automatisme est
primordial pour le maintien de l�int�grit� de l�adversaire
Dans cette notion de
��Suivi de l�adversaire�� on retrouve donc 3 automatismes imbriqu�s : Le
��suivi de l�adversaire��, le ��Maintien dans l�aire de combat�� et
l���Anti-t�l�scopage��.
Le coin
du sp�cialiste :
En intelligence
Artificielle, des automates � �tat finis - des ��bots�-� ont �t� test�s dans le
jeux Half-Life (199 � Value Software), ils sont capables de poursuivre un
joueur (et 5 autres t�ches en parall�le), le mod�le est simple, rapide et
r�p�titif, ils serait adapt� � notre cas. Sur une surface plane limit�e (l�aire
de combat) le nombre de d�placement est born�.
3.1.4.3/ Automatisme de replis
� protection du partenaire ��
o
Automatisme de replis
o
N�cessit� d�interdire le d�placement dans des zones ��de protection��
autour de l�adversaire afin de le prot�ger et d��viter le t�lescopage. Ces
zones �voluent avec l�adversaire.
o
Voir 3.9.3
3.1.4.4/ Automatisme de recherche
de faille, d�ouverture dans la position
adverse
o
Biblioth�que des positions attaquables :
comparaison clich� du combat avec la biblioth�que
�
Analyseur de forme,
toujours gourmands en temps de calcul (� quelle fr�quence �chantillonner�)
�
N�cessite des sp�cialistes
��m�tier�� de ce type de traitement du signal
o
Recherche des lacunes : �tablir des listes
��palpables�� de lacunes visibles
o
Recherche des d�faillances : �tablir des
listes ��palpables�� de d�faillances compr�hensibles
3.1.4.5/ Automatisme de gestion
de simultan�it� ~
Qu�est
ce que la simultan�it� ? Derri�re la concomitance on trouve deux notions
diff�rentes (le d�but et la conclusion de l�attaque) : L�ant�riorit� de
d�but de l�attaque est diff�rent de l�arriv�e de l�attaque sur la cible (voir
temps de r�action).
-
D�marrage des 2 attaques simultan�es / 1er
cas : les 2 cannistes ont vu leur simultan�it�, ils arr�tent leur action �
on reprend le cours du combat.
-
D�marrage des 2 attaques simultan�es / 2�me
cas : un canniste est nettement plus rapide. Il touche largement le
premier mais l�autre touche �galement. Les notions de ��nettement�� et de
��largement�� sont d�j� sujettes � interpr�tation. De plus ici, on trouve plus
q�un ensemble de param�tres � d�tecter. L�intention est � interpr�ter, elle ne
semble pas quantifiable.
-
D�marrage des 2 attaques simultan�es / 3�me
cas : arr�t d�une des 2 actions. C�est celui qui a arr�t� en toute bonne
fois qui est p�nalis�.
-
D�marrage des 2 attaque simultan�es / 4�me
cas : les attaques se poursuivent. On revoit ici pointer la notion de
touche et de capteur de touche ! C�est un probl�me similaire.
La
gestion absolue de l�ant�riorit� de la touche avec une base de temps commune
est li�e aux capteurs de touche.
La
gestion des s�ries tr�s rapide de mouvements est �galement intimement li�e aux
capteurs de touche.
Au
final la gestion de la simultan�it� implique la connaissance de la date-heure-seconde des 2 touches mais �galement la connaissance
de la date-heure-seconde du d�but du
mouvement des 2 cannistes. On retrouve une notion de r�troactivit� dans la
r�cup�ration de l�information (correcteur automatique � D�riv� �). En
effet, c�est en cas de touches simultan�es que le param�tre date-heure-seconde
du d�but du mouvement de chaque canniste est n�cessaire.
Alors
une autre question s�impose : Quand d�marre le mouvement ? Au d�but, �
la fin de l�arm�, � partir de la garde neutre�?
3.1.4.6/ A cela on rajoute des logiques, des
algorithmes de calcul et d�analyse :
-
Mode
d�apprentissage : Algorithme d�essai des coups qui passent / Comment
tester l�adversaire ?
-
Capitalisation des donn�es
de combat : calcul de probabilit�, de taux de r�ussite/�chec d�action
(mod�le g�n�tique) + analyse des r�sultats.
Le coin
du sp�cialiste : Le syst�me est
donc multit�che avec des process interactifs : l�environnement est
multit�che collaboratif
3.1.5/ Architecture
entre automatismes �
Ces automatismes - qu�on peut consid�rer comme une
�quipe de multi-agents - contribuent � la r�alisation collective d�une mission
� r�f�rentiel commun �. L��quipe doit toucher ET ne pas �tre
touch�.
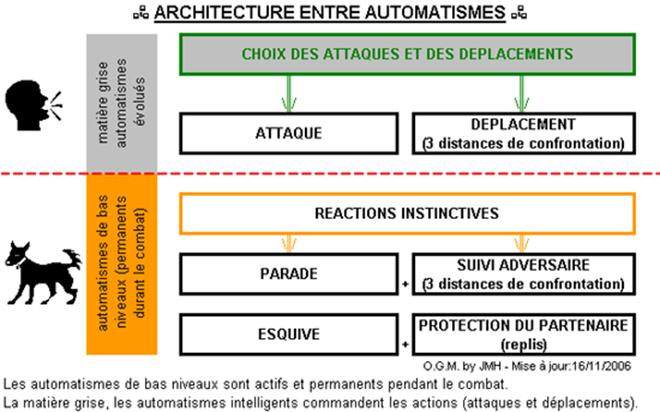
3.1.6/ Niveau
technique cannistique estim�e du syst�me &
Analogie entre les niveaux d�automatisme et les
grades de canne de combat
De mani�re purement th�orique on peut estimer
que :
-
L� Automatisme sans
m�moire de combat :
o
Touche : int�gr� dans
l�algorithme des quadrants
o
N�a pas � m�moriser
d�apprentissage. Ses connaissances sont �crites dans le marbre sans
modification possible
o
Il peut esp�rer au mieux
un 3�me degr� du Pommeau vert, c'est-�-dire que..
-
L� Automatisme avec
m�moire de combat :
o
N�est pas touch� :
(sa parade est tr�s efficace, il esquivera si on lui apprend un algorithme
d�esquive (choix entre la parade et l�esquive)
o
Gestion des 3 distances de
confrontation : int�gr� dans l�algorithme des quadrants
o
Liste d�encha�nement
vari� : ne pose pas de probl�me
o
La construction de
l�assaut est r�alis�e par apprentissage (Q-Learning) durant le combat. Les
points forts et les points faibles sont d�tect�s par cet apprentissage.
o
La connaissance des zones
faibles de l�adversaire est acquise par les algorithmes des quadrants
o
Il peut esp�rer au mieux un 3�me degr� du Pommeau
Rouge
-
L� Automatisme avec acquis
de combat :
o
Impl�menter des analyses
visuelles compl�mentaires (d�tails de sp�cialistes) � affinage de le
reconnaissance de forme.
o
Il a la m�moire des
pr�c�dents combat, ils ont �t� analys�s, tri�s et int�gr�s ; de mini
r�gles en ont �t� tir�e : Q-Learning multifacette)
o
Connaissance
organisationnelle de type encyclop�dique : m�moire, disque dur et bonne
indexation
o
Il peut esp�rer au mieux
un Deuxi�me degr� du Pommeau Blanc
Un automatisme avec un
syst�me d�apprentissage - sous quelques r�serves de param�trage - pourrait
devenir un combattant redoutable. Une combinaison mixte d�apprentissage et de
��recette de cuisine�� de bons cannistes associ�e � une analyse de forme fine
et performante pourrait rendre l�automatisme quasiment invincible car il ne
fatigue jamais.
3.2/
Automatisme sans m�moire de combat "
3.2.2/ Principe
de boucle de r�tro-contr�le d�un encha�nement choisis
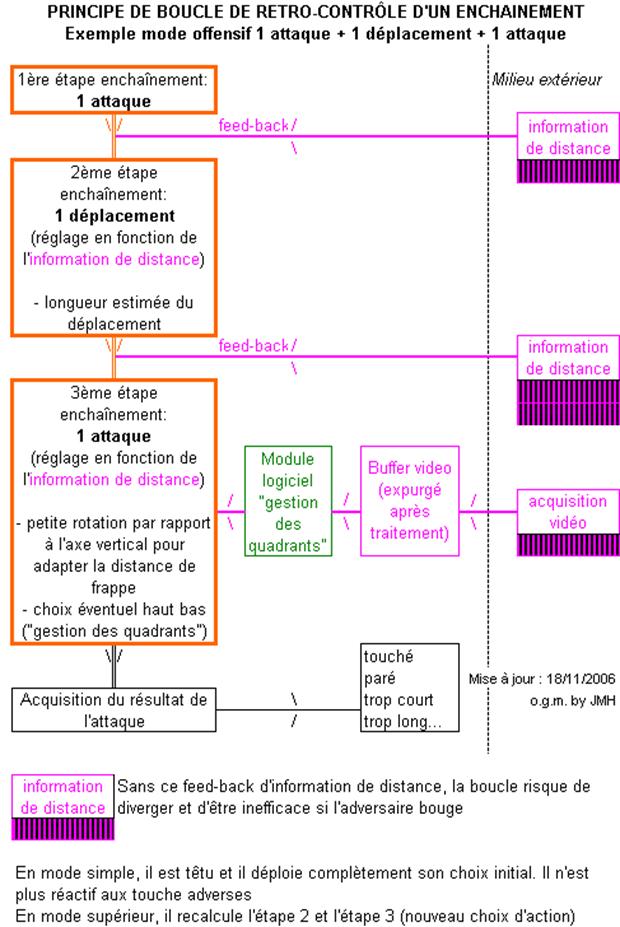
3.3/ Automatisme de recherche de faille, d�ouverture
dans la position adverses ~
3.3.1/ Mode actif basique -
appel� ��Recherche automatique de faille��
3.3.2/ � 4 Biblioth�que des positions attaquables / positions � faille �
3.3.2.1/ Que trouve-t-on dans la biblioth�que ?
-
1�re loi :
position de la canne adverse non compatible avec une parade �ventuelle
-
2�me loi :
position de la canne ==> quelles zones libres ?
-
3�me loi :
position g�n�rale de l�adversaire
o
D�sorientation
o
Lacune = position
inop�rante des appuis (d�s�quilibre, ancrage sur un appui) + lenteur + style
st�r�otyp� (voir aussi loi de comportement de l�adversaire, �a devient
rapidement compliqu�) +
o
D�placements inopportuns
(mauvaise appr�ciation des distances de frappe�)
o
impr�cision de l�attaque
-
4�me loi :
D�faillances : d�couragement + fatigue physique
Liste des positions (de cannes) porteuses
d�informations utiles ou exploitables
|
Type
d�ENTREE
M
|
Description
globale de la position
|
Interpr�tations
possibles
|
|
Position
canne
|
1/ canne � G ou � D ?
2/ bras est en crois� ?
3/ canne en garde
4/ canne en hauteur ?
5/ canne vers le bas ?
6/ canne tr�s �cart�e de l�axe de combat
7/ le reste des positions donne de l�incertitude
|
2�me
loi ?
2�me
loi ?
1�re
loi ? - 2�me loi ?
2�me
loi ?
1�re
loi ?
|
|
Position
g�n�rale
|
|
3�me
loi ?
|
|
Position
des jambes (c)
Mouvement
des jambes
|
|
c :
le poids du corps sur la jambe avant : elle ne peut �tre d�plac�e ==<
attaque de cette jambe : de quel c�t�
le
poids du corps sur l�arri�re ==> volte longue pour chercher la jambe
arri�re (par devant elle est invuln�rable)
|
Voir 3.6.2.1/ Quadrant des menaces� :
o� est l�attaque en pr�paration associ�?
3.3.2.2/ Comment l�organiser, sur quels
crit�res ?
Le bon combattant a une indexation claire et
simple, rapide � mettre en �uvre mais peu �tre complexe � expliquer. Il sera au
dessus du lot des combattants. Cette biblioth�que (ou base de connaissance) est
la plus d�licate � renseigner, elle est construite � partir de l�exp�rience.
3.3.3/ ��Algorithme de provocation de faille dans la position
adverses�� � niveau sup�rieur
-
Rep�re (4)
-
Voir 3.4/ Automatisme avec m�moire de combat :
C�est un niveau sup�rieur :
Quelques
id�es :
-
d�calages
-
d�bordement
-
fixation, ��gel�� de
l�adversaire par encha�nement de coups
-
feintes de�
-
3.4/
Automatisme avec m�moire de combat <
3.4.1. � 4 Biblioth�que Historique de combat�
1�re clef d�indexation
possible : le coup
� touche� / le coup ne � passent pas �
La m�morisation des actes, actions et r�sultats
n�cessite une � conscience en retrait � par rapport au combat en
temps r�el ; c�es r�ellement un niveau sup�rieur.
3.5/
Automatisme avec acquis de combat >
3.5.1/ Acquision par syst�me de
classeurs
Mode 3 : sup�rieur - appel� ��Algorithme avec acquis de combat�� ou ��feuille
de route & plan de bataille��
Bas� sur un Algorithme de construction de combat
o
int�gre les 2 premiers
modes,
o
Recherche des lois de
comportement de l�adversaire
�
Quelle est la nature de la
parade adverse (longue ou br�ve) ?
�
Si l�adversaire
garde sa parade longtemps en position Alors
privil�gier les encha�nements variant les �tages de combat (ex: lat�ral puis
fente).
�
Si l�adversaire
revient rapidement en garde apr�s sa parade Alors
privil�gier les encha�nements avec doublement/triplement des coups.
�
Quel(s) est(sont) le(s) d�placement(s)
privil�gi�(s) de l�adversaire?
�
Si l�adversaire
utilise toujours le m�me d�placement, Alors le
pr�dicteur de trajectoire peut anticiper son futur d�placement et adapter en
cons�quence, c'est-�-dire trouver le quadrant de combat qui sera disponible �
la fin de la trajectoire.
�
Voir ��mod�le
g�n�tique et syst�mes de classeurs : Acquisition des lois de comportement
de l�adversaire��).
o
Capitalisation des
informations du combat : encha�nements des 2 adversaires, taux de
r�ussite/�chec � coupl� avec analyse probabilit� et pr�diction
�
voir ��mod�le g�n�tique et syst�mes de classeurs :
Acquisition de la base de connaissance
des ��coups qui touchent��).
o
Recherche d�une liste
d�encha�nements � r�aliser pour toucher l�adversaire - alternance des encha�nements, retraits
temporaires de certains encha�nement puis remise en place de ces encha�nement
ponctuellement au BON moment. C�est la ��feuille de route��.
o
Amener l�adversaire �
r�agir comme on le souhaite
o
Suivi du/des fils
directeurs
Et enfin : L�absence de tactique est elle-m�me
une tactique
Le coin
du sp�cialiste :
Acquisitions
de la base de connaissance des ��coups qui touchent�� :
Les
syst�mes de classeurs utilisant le mod�le g�n�tique pourraient �tre utilis�s
dans cette recherche d�acquis du combat. En effet, Meyer (1999) a
d�montr� avec son ��architecture � hi�rarchie minimale SAGACE�� qu�on pouvait
utiliser 2 syst�mes de classeurs pour acqu�rir des connaissances en vue de
gagner. � Un syst�me de classeurs est charg� de pr�dire le comportement de
l�adversaire, tandis que l�autre doit apprendre ce qu�il faut pour surprendre
et gagner. Une sorte de hi�rarchie existe dans entre ces 2 syst�mes de
classeur, puisque le second s�appuie sur les r�sultats du premier. C�est une
mani�re d�enrichir la base de connaissance des ��coups qui touchent��. Plus le
syst�me combat, plus il apprend. Plus l�adversaire est bon, meilleur sera son
acquis.
On peut
ainsi :
-
Ouvrir un couple de classeurs par adversaire : la base de connaissance des ��coups qui
touchent� est adapt�e � l�adversaire.
-
Ouvrir un couple de classeurs par niveau
adverse : le syst�me est adapt� �
la population qu�il rencontre.
-
Ouvrir un coupe de classeur g�n�ral : les progr�s du
syst�me devraient �tre spectaculaires.
Afin
d��viter des ��sp�cialisations�� excessives, il est indispensable de limiter le
nombre de classeurs sp�cialis�s par des quotas. En effet, les classeurs
g�n�raux, bien que moins performants, peuvent se sortir de situations nouvelles
ou d�licates.
Acquis
de la base de connaissance des ��lois de comportement de l�adversaire�� (lois
de g�n�ralisation) :
Les
syst�mes de classeurs utilisant le mod�le g�n�tique pourraient �tre utilis�s
dans cette recherche de loi de comportement.
En
s�lectionnant pour l��volution, non pas les classeurs qui re�oivent le plus de
r�compenses (qui ��touchent��) mais ceux qui savent pr�dire au mieux la
r�compense attendue apr�s chaque activation, on retrouve des classeurs stables
avec de la signification. Le classeur prend la forme � Si avec des
conditions C, on effectue l�action A, alors on arrivera dans l�etat E �.
Cet algorithme de g�n�ralisation d�tecte des r�gles peu sensibles aux
variations.
Les lois
de comportement sont plus adapt�es � un adversaire individuel qu�� un niveau
adverse ou � un ensemble.
Les
syst�mes motivationnels :
Avec un
algorithme Anytime de planification, il est possible d��laborer une mini
feuille de route. Plus on laisse de temps � l�algorithme, plus il peut affiner
son plan, mais il est capable � tout moment de fournir des solutions.
Avec un
m�canisme r�actif la solution est imm�diate.
Avec un
m�canisme de planification pur, le calcul est long et il faut attendre la fin
pour avoir le r�sultat. Il y a donc �galement une notion de temps disponible
pour le calcul � impl�menter dans le syst�me.
L�auto-organisation
et la cr�ation d�action (initiative) restent une notion tr�s humaine.
3.5.2. Application
pratique des syst�mes de classeur adapt�s � la canne de combat
Exemple
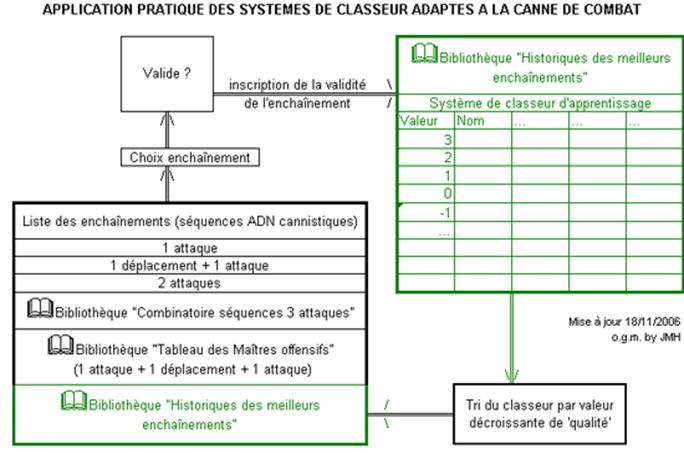
Si l�encha�nement choisi donne un touche, il est
inscrit dans la biblioth�que � historique des meilleurs
encha�nements � avec une valeur sup�rieure. Puis on choisi un autre
encha�nement.
Si l�encha�nement ne m�ne � rien on en choisi un
deuxi�me�
Ce syst�me a peu de pr�-acquis, l�acquisition du
savoir est longue et bestiale mais face � un combattant toujours identique il
va progresser et vraisemblablement il finira par gagner� sauf si l�adversaire
apprend �galement !
En combattant avec de multiples cannistes il va
n�anmoins progresser et il n�est pas impossible qu�une ou des lois cannistiques
se d�gagent par cet apprentissage.
Une m�thode � la mode � la personnalisation face
au client � peut lui permettre d�apprendre s�par�ment pour chaque canniste
et utiliser le syst�me de classeur adapt� � chaque adversaire.
En 3 minutes et face � un nouveau canniste, il a
tr�s peu de chance gagner.
Il est donc indispensable de poss�der soit des
algorithmes plus �volu�s soit un pr� requis d�un meilleur niveau.
3.6/
Automatisme avec Recettes de cuisine &
Niveau sup�rieur
- appel� ��Algorithme avec recettes de cuisine��
ou ���choix du libraire � dans la 4 Petite biblioth�que des encha�nements
programm�s��
Bas� sur l�acquis des ma�tres d�arme, les encha�nements
ont fait leur preuve. L�acquis est empirique et bas� sur l�exp�rience des
combattants. Il permet de capitaliser un savoir ��encyclop�dique�� d�j�
�prouv�. Cette m�thodologie de l�acquis ��empirique�� a fait ses preuves dans
le monde du jeux des �checs. Des grands ma�tre Es echecs font programmer leur
m�thode de jeux, et battent r�guli�rement les algorithmes d�analyse logique et
scientifique. Lorsque l�ordinateur bat le champion, c�est qu�il lui a �t�
impl�ment� une m�thode empirique d�un ou de plusieurs autres ma�tres.
|
LOI DE COMPORTEMENT PREDEFINI
|
PROFIL
|
|
LOI
� MONO ENTREE �
|
|
|
D�placement tactique � changement d�axe de combat
- Quadrant 2 (ou 3)
|
agilit�
|
|
Eloignement maxi de la canne sans d�placement
|
|
|
Eloignement maxi de la canne avec d�placement
|
|
|
Changement d��tage de combat
|
|
|
Changement d��tage de combat en diagonale
|
Le Z
|
|
Changement de plan � l�attaque finale H-V {Entr�e
=H ==> Sortie=V}
|
|
|
Changement de plan � l�attaque finale V-H {Entr�e=V
==> Sortie=H}
|
|
|
Changement de rythme
|
|
|
Feinte
|
|
|
Encha�nements avec dernier mouvement �
incertitude possible Haut-Bas ou Bas-Haut
|
|
|
Choix al�atoire de l'encha�nement (hazard pur)
|
|
|
LOI
� BI ENTREES �
|
|
|
Fonction du r�sultat souhait� (r�sultat final de
la s�quence)
|
|
|
|
|
Le coin
du sp�cialiste : Selon le mod�le de
Rasmussen, le niveau bas� sur les r�gles est
le niveau S (Skill-Based Behavior) : L�ex�cution est r�alis�e sans
contr�le conscient. La situation est famili�re (sans impr�vu). L�automatisme
est peu gourmant en ressources de calcul. Les recettes de cuisine sont
appliqu�es.
A
contrario de beaucoup d��tudes et de recherches, nous allons utiliser des
mod�les empiriques bas�s sur le savoir-faire. Les autres mod�les aboutissent �
des usines � gaz. Prenons un autre chemin afin d�avoir un mod�le rapide.
3.6.1/ Les recettes de cuisine
3.6.1.1/ 4 Petite biblioth�que des
encha�nements programm�s :
Comment est organis� le tableau :
Classement : 1er mouvement en
attaque (offensif), 1er mouvement en parade verticale (d�fensif), 1er
mouvement en parade lat�rale (d�fensif)
La colonne � ENTREE � est le type de
tactique employ� (tactique offensive ou d�fensive)
La colonne � SORTIE � est la zone
d�attaque finale � toucher.
La colonne � ENCHAINEMENT � donne la
description de l�encha�nement associ� � une ENTREE et � UNE SORTIE.
Si l�encha�nement poss�de une qualit�
� Incertitude / changement de plan �, il est un choix
pr�f�rentiel ; les encha�nements choisis et d�crits dans le tableau ont
tous l�une ou l�autre de ces qualit�s.
Comment utiliser le tableau :
L�encha�nement choisi d�pend donc de l�ENTREE, de
la SORTIE , d�un choix qualitatif de l�encha�nement (H-B ou V-H voire G-D) et
de l�information de la canne offensive (ext�rieur ou crois�).
En mode d�fensif, l�ENTREE est impos�e par
l�adversaire (son coup de canne). La SORTIE (zone d�attaque finale souhait�e)
d�finie, il ne reste plus qu�� choisir un ENCHAINEMENT satisfaisant aux 2
crit�res ENTREE et SORTIE.
Une 2�me entr�e d�information : la canne
offensive adverse vient d�un ext�rieur ou d�un crois� ?
En mode offensif, l�ENTREE et la SORTIE sont �
choisir, puis il ne reste plus qu�� choisir un ENCHAINEMENT satisfaisant aux 2
crit�res ENTREE et SORTIE.
|
Type
d�ENTREE
M
|
Description
de l� ENCHAINEMENT
|
Nom
imag�
T
|
Incertitude / changement de plan
|
SORTIE :
N
Zone
d�attaque finale
|
|
Offensif
lat�ral
|
lat�ral ext�rieur + lat�ral crois� + fente avant du
c�t� du lat�ral
|
Le
Z
|
H-B ?
|
c�t� idem entr�e
|
|
Offensif
lat�ral
|
lat�ral crois� + lat�ral ext�rieur + fente avant du
c�t� lat�ral crois�
|
Le
Z crois�
|
H-B ?
|
c�t� idem entr�e
|
|
Offensif
lat�ral
|
lat�ral ext�rieur + lat�ral crois� + fente
arri�re + lat�ral crois� bas
|
My
clem
|
H-B ?
|
c�t� oppos� de l�entr�e
|
|
Offensif
lat�ral
|
lat�ral crois� + lat�ral ext�rieur + fente
arri�re + lat�ral crois� bas
|
|
H-B ?
|
c�t� idem entr�e
|
|
Offensif
lat�ral
|
lat�ral ext�rieur haut, m�dian, bas
|
L�asym�trique
|
H-B ?
|
c�t� idem entr�e
|
|
Offensif
lat�ral
|
lat�ral crois� haut, m�dian, bas
|
L�asym�trique
crois�
|
H-B ?
|
c�t� idem entr�e
|
|
Offensif
lat�ral
|
lat�ral ext�rieur + changement de main + bris�
|
|
V-H
|
sortie verticale � c�t� oppos� de l�entr�e
|
|
Offensif
lat�ral
|
Feinte de lat�ral ext�rieur / d�calage vers
l�ext�rieur + bris� avec recalage vers l�axe de combat
|
|
V-H
|
sortie verticale
|
|
Offensif
lat�ral
|
Lat�ral ext�rieur + avancer sur adversaire +
s��loigner lat�ralement (du c�t� crois�) en voltant + lat�ral crois�
|
Avancer/rompre
|
|
c�t� oppos� de l�entr�e
|
|
|
|
|
|
|
|
Offensif
vertical
|
bris� + crois� t�te + bris� + crois� t�te�
|
Le
8 continu
|
|
sortie verticale
|
|
Offensif
vertical
|
Feinte de bris� + (feinte de bris�) + bris�
|
J�ai
vais pas j�y vais
|
|
sortie verticale
|
|
Offensif
vertical
|
crois� t�te (feinte de�) + fente avant + lat�ral
ext�rieur bas
|
|
V-H
|
sortie lat�rale � c�t� oppos� de l�entr�e
|
|
Offensif
vertical
|
bris� + lat�ral crois� + volte sans changement de
main sur place + lat�ral crois� bas
|
Le
r�gulateur � boule
|
V-H
|
sortie lat�rale � c�t� oppos� de l�entr�e
|
|
Offensif
vertical
|
bris� + changement de main + lat�ral crois�
|
La
charge de cavalerie
|
V-H
H-B ?
|
sortie lat�rale � c�t� idem entr�e
|
|
Offensif
vertical
|
bris� + feinte de lat�ral crois� + fente avant +
lat�ral ext�rieur bas
|
|
V-H
|
sortie lat�rale � c�t� idem entr�e
|
|
Offensif
vertical
|
bris� + feinte de lat�ral ext�rieur + fente avant
+ lat�ral crois� bas
|
|
V-H
|
sortie lat�rale � c�t� oppos� de l�entr�e
|
|
Offensif
vertical
|
crois� t�te + lat�ral ext�rieur
|
Twirling
baton
|
V-H
H-B ?
|
c�t� oppos� de l�entr�e
|
|
|
|
|
|
|
|
D�fensif
vertical
|
protection du c�t� de l�attaque + crois� t�te +
bris�
|
|
|
sortie verticale
� c�t� idem entr�e
|
|
D�fensif
vertical
|
protection du c�t� de l�attaque + fente arri�re +
lat�ral crois�
|
|
H-B ?
|
sortie lat�rale � c�t� oppos� de l�entr�e
|
|
D�fensif
vertical
|
protection du c�t� de l�attaque + crois� bas
|
|
H-B ?
|
sortie lat�rale � c�t� oppos� de l�entr�e
|
|
|
|
|
|
|
|
D�fensif
lat�ral
|
parade et attaque du c�t� de la parade + crois�
t�te (ou feinte de�) + fente avant
|
Riposte
instinctive
|
V-H
|
c�t� oppos� de l�entr�e
|
|
D�fensif
lat�ral
|
parade lat�rale + fente arri�re + lat�ral crois�
|
Couper
l�herbe sous le pied
|
H-B ?
|
c�t� oppos� de l�entr�e
|
|
D�fensif
lat�ral
|
parade lat�rale crois�e + fente arri�re + lat�ral
crois�
|
Couper
l�herbe sous le pied
|
H-B ?
|
sortie lat�rale � c�t� idem entr�e
|
|
Riposte instinctive avec 2�me entr�e d�information
(canne adverse vient d�un ext�rieur ou d�un crois� ?
|
|
D�fensif
lat�ral
|
Parade lat�rale + volte sans changement de main
(volte du c�t� de l�attaque) + lat�ral
|
Riposte
instinctive
|
V-H
|
|
|
|
2�me entr�e = canne adverse =
crois� ==> lat�ral crois�
|
|
|
sortie lat�rale � c�t� idem entr�e
|
|
|
2�me entr�e = canne adverse = crois�
==> feinte de lat�ral crois� + lat�ral ext�rieur
|
|
|
c�t� oppos� de l�entr�e
|
|
|
2�me entr�e = canne adverse =
ext�rieur ==> lat�ral crois�
|
|
|
c�t� oppos� de
l�entr�e
|
|
|
2�me entr�e = canne adverse =
ext�rieur ==> feinte de lat�ral crois� + lat�ral ext�rieur
|
|
|
sortie lat�rale � c�t� idem entr�e
|
|
D�fensif
lat�ral
|
Parade crois�e + volte avec changement de main
(volte du c�t� de l�attaque) + lat�ral
2�me entr�e (1 information
suppl�mentaire) : canne adverse vient d�un ext�rieur ou d�un
crois� ?
|
Riposte
instinctive
|
V-H
|
|
|
|
2�me entr�e = canne adverse = crois�
==> lat�ral crois�
|
|
|
sortie lat�rale � c�t� idem entr�e
|
|
|
2�me entr�e = canne adverse = crois�
==> feinte de lat�ral crois� + lat�ral ext�rieur
|
|
|
c�t� oppos� de l�entr�e
|
|
|
2�me entr�e = canne adverse =
ext�rieur ==> lat�ral crois�
|
|
|
c�t� oppos� de l�entr�e
|
|
|
2�me entr�e = canne adverse =
ext�rieur ==> feinte de lat�ral crois� + lat�ral ext�rieur
|
|
|
sortie lat�rale � c�t� idem entr�e
|
|
Changement d�axe de combat (voir quadrants de combat :
quadrant de positions de l�adversaire 3.6.2.3
|
|
D�fensif
vertical
|
protection crois�e (du c�t� oppos� de l�attaque)
+ fente avant + lat�ral crois�
|
|
H-B ?
G-D
|
sortie lat�rale � c�t� idem entr�e + Quadrant 2
|
|
D�fensif
lat�ral
|
volte du c�t� de l�attaque + lat�ral
|
Riposte instinctive :
Rock �N Roll with the stick / Rearmament
perp�tuel
|
H-B ?
|
c�t� oppos� de l�entr�e
+ Quadrant 2
|
|
Offensif
circulaire
|
volte sans changement de main + volte sans
changement de main
|
Voltium
|
|
c�t� oppos� de l�entr�e
+Quadrant 2 ou 3
|
|
Offensif
circulaire
|
fente avant + lat�ral ext�rieur + changement de
main dans le dos + lat�ral ext�rieur
|
Arabesque
basse
|
|
c�t� oppos� de l�entr�e + Quadrant 2
|
|
Mouvement � ��tout faire��
|
|
Offensif
+
Offensif
circulaire + D�fensif + D�fensif circulaire
|
Changement de main
|
|
|
|
Les tableaux du
paragraphe 1.4.3.2 donnent des lots de
s�quences offensives (3 attaques, des attaques avec d�placement) et un lot de
s�quences r�actives (parade, d�placement et attaque).
3.6.1.2/ Comment distribuer les encha�nements
durant le combat : lois de comportement en mode automatique ?
Logique du mode offensif :
1�re �tape : Quelle zone finale je veux TOUCHER (1er
choix) puis
2�me
�tape : Par quelle attaque ��leure�� (attaque r�elle ou feinte de) je d�marre (2�me choix), et enfin,
3�me
�tape : en fonction de ces 2 premiers choix je choisis l�encha�nement satisfaisant
aux 2 premier choix.
-
1�re loi :
(Mode actif) : attaque du c�t� oppos� de la canne ==> privil�gier
asym�trique
-
2�me loi :
(Mode r�actif) : Liste d�encha�nements avec 1er mouvement en
parade lat�ral
-
3�me loi :
(Mode r�actif) : Liste d�encha�nements avec 1er mouvement en
parade verticale
-
4�me loi :
(Mode r�actif pour adversaire � mouvement rapide) : se d�porter + contre-attaque
qui coupe l��lan
-
5�me loi :
(Mode r�actif pour adversaire � mouvement rapide mais peu nombreux) : bond
en arri�re
-
6�me loi :
(Mode actif pour adversaire � mouvement lent) : toucher avant d��tre
touch�
-
7�me loi :
(Mode r�actif pour adversaire � parade maintenue longtemps) : choisir un
encha�nement alternant attaques hautes et basses ( varier les �tages de combat)
-
8�me loi :
(Mode r�actif pour adversaire � parade rapide et r�organisation rapide de
l�adversaire) : choisir un encha�nement doublant ou triplant les coups.
-
9�me loi :
(Mode actif) : Cr�er une habitude � installer le comportement �
-
�
3.6.1.3/ Construction d�une feuille de route &
plan de � bataille � (ou plan d�action)
Le point d�entr�e d�un plan est le but � atteindre.
La feuille de route est la somme de plans futurs plausibles. Cette somme de
plans a �t� analys�e afin de d�tecter les interactions ou les incoh�rences
entre les plans. A cours de l�ex�cution de la feuille de roue, les plans
doivent pouvoir �tre modifi� si la donne change. Les mauvais plans doivent
pouvoir �tre abandonn�s pour en atteindre d�autres. Le savoir-faire est bas�
sur des r�gles analytiques ET sur des r�gles psychologiques. On parle de r�gle
mais pourtant l�acteur humain poss�de une rationalit� limit�e.
* Comment passer du mode r�actif au mode
offensif
Le mode r�actif est un
mode naturel, attentiste, �nerg�tiquement �conomique. Le mode offensif implique
une cr�ation, un fil directeur quelconque.
Le passage en mode
offensif peut s�activer de diff�rentes mani�res.
-
Temps de latence chez
l�adversaire
-
D�tection de ��Position
attaquable��
-
A la fin d�un encha�nement
adverse
-
Encha�nements adverse
long : rompre la continuit� de l�encha�nement adverse
-
�
1er niveau - Habitus :
encha�nements pr�programm�s + � il a pris l�habitude que je fasse� �
==> Modifier la fin de l�encha�nement (but
confusion) l l�adversaire avait pris l�habitude de�Du coup son mouvement n�est
pas adapt� : il y a faille dans la
riposte de l�adversaire.
Comment modifier l�encha�nement ?
- changer l�attaque de
sortie (autre attaque ou autre zone de frappe)
2�me niveau - La m�moire de l��l�phant :
m�moire des coups qui touches
si le coup � touche � :
-
Ne pas le resservir tout
de suite pour que l�adversaire oublie, sinon lui aussi fait son � apprentissage �,
-
Cette information doit
docn s�int�grer � la � feuille de route �, le plan de bataille en
cours d��laboration.
-
A distribuer de mani�re
al�atoire pendant le combat
-
1�re id�e de
strat�gie : b�tir le combat pour justement pouvoir les replacer.
si le coup ne passe pas :
-
il peut resservir
ult�rieurement de leurre, de cr�ation d�habitude
3�me niveau � Le coup de patte du ma�tre :
� je veux l�amener �� et j�esp�re qu�il r�agira toujours de la m�me
mani�re� �
==> Trouver une contre-attaque � la r�ponse
attendue.
Le travail collaboratif a besoin d�un 3�me
niveau. En effet si l�on veut � par exemple � faire travailler la parade
crois�e du partenaire, on s�arrange pour que la canne arrive sur son crois�. La
d�marche intellectuelle est inverse.
* Comment choisir la longueur de l�encha�nement
1 mouvement, 2 mouvements ou 3 mouvements ?
-
1�re
id�e : choisir indiff�remment 1, 2 ou 3 mouvements
o
Avantage :
incertitude compl�te
o
Inconv�nient : combat
non construit sans fil directeur
-
2�me
id�e : la solution � 1 mouvement est activ�e lorsque LA faille est
d�tect�e. Sinon la solution � 2 ou 3 mouvement est activ�e indiff�remment. On
voit ici qu�il est n�cessaire de trouver d�autres crit�res de d�cision pour
affiner la m�thode.
-
3�me
id�e : les encha�nements sont stock�s dans un syst�me de classeur par
apprentissage et renforcement.
3.6.1.4/ Un concept � la
mode : Les profils de combattants

[Dessin : photo de ��famille de combat��]
3.6.2/ Mod�lisation
de l�espace du combat : les quadrants de combat�
Analyse 2D plus rapide que l�analyse 3D
Une mod�lisation en 2D est plus rapide et plus
simple d�analyse que l�analyse 3D qui n�cessite beaucoup de ressources de
calcul. De plus la mod�lisation doit �tre sch�matique, simple et efficace. Les
d�tails sont �limin�s, seuls les informations pertinentes sont conserv�es.
Le quadrant des menaces synth�tise les 3 zones donnant une information
d�attaque pr�visionnelle, il donne �galement les zones libres � attaquer (3.6.2.1).
Le quadrant des protections synth�tise le volume �
prot�ger des 5 attaques de base (3.6.2.2).
Le quadrant des positions adverses synth�tise les 4
zones g�ographiques possibles de l�adversaire (3.6.2.3).
3.6.2.1/ Quadrant des menaces� :
o� est l�attaque en pr�paration ?
2 natures diff�rentes d�informations sont �
r�cup�rer dans ce plan :
-
informations de position, et
d�allure g�n�rale de l�adversaire : la position de l�adversaire est-elle
attaque ? A-t-elle des failles de garde ? L�extraction de ce type
d�information est d�licate.
-
information de mouvement
o
Information d�fensive : Une zone est en
forte activit� : une attaque est en pr�paration
on en d�duit :
o
Information
offensive : Les autres zones sont libres pour une attaque �ventuelle
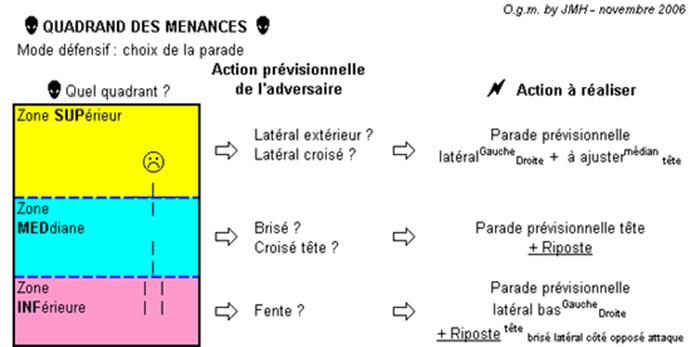
Quelle zone est occup�e ?
Ici l�analyse est ax�e sur la position de la canne.
Si la zone SUP�rieure est occup�e alors : les zones
MEDiane et INF�rieure sont libres et donc attaquables. La zone la plus �loign�e
(zone INF�rieure) est la plus opportune.
Si la zone MEDiane est occup�e alors les zones
SUP�rieure et INFerieure sont disponibles (libres et attaquables). Aucune des
zones SUP ou INF n�est plus opportune l�une que l�autre.
Si la zone INF�rieure est occup�e alors les zones
SUP�rieure et MEDiane sont disponibles (libres et attaquables). La zone la plus
�loign�e (zone SUP�rieure) est la plus opportune.
Point particulier : Analyse de la ligne des �paules
et des bras �
Dans quelle zone est le mouvement ?
Ici l�analyse est ax�e sur le mouvement en
pr�paration. Le but est de savoir ce qui va se passer en fonction du mouvement
d�tect� (avec la ligne des �paules et des bras).
Mouvement
pr�par� estim� = fonction (ligne des �paules + bras + canne)
Cette analyse permet d�anticiper la parade.
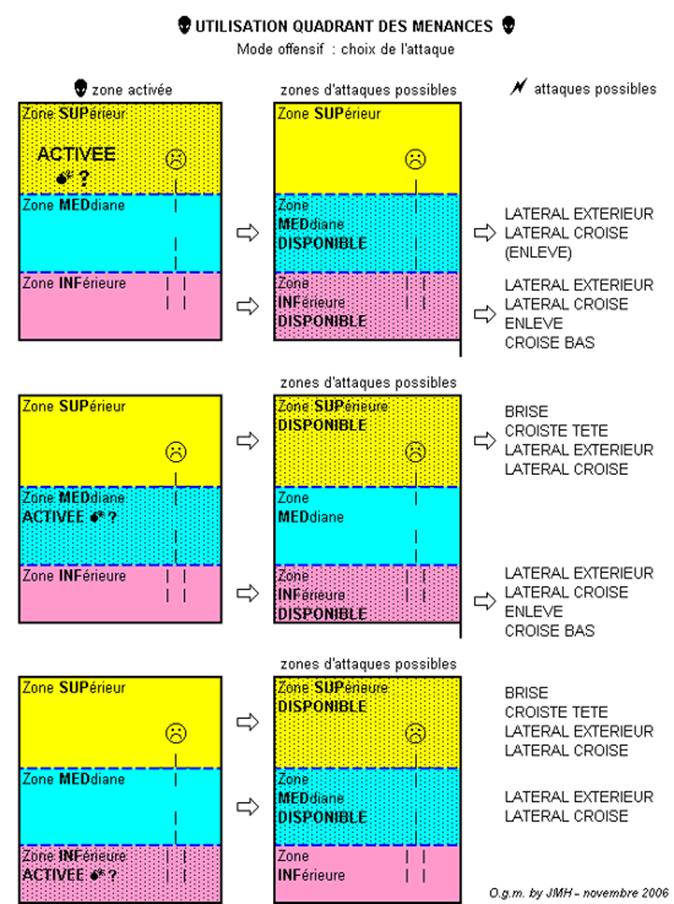
1 analyse � 1 strat�gie
Occuper les 3 zones SUP, MED et INF par des
mouvements al�atoires � trop d�informations, r�cepteurs satur�s,
pas d�information fiable.
Qu�est ce que la canne ? �|
Vue en plan la canne est voisine d�un rectangle ou
d�un trap�ze avec une hauteur et largeur maxi bien d�finie en fonction de sa
distance au canniste attaqu�. Elle rentre donc dans un gabarit qui peut �tre
recherch� de mani�re automatique et bestiale (la forme est connue surtout
lorsqu�elle arrive � proximit� du canniste attaqu�). L�information modifi�e
dans ce gabarit (le but est de suivre ce gabarit dans le temps) donne �galement
une information de distance et une information de direction (est-ce que la
canne se rapproche ou est-ce qu�elle s��loigne ?).
3.6.2.2/ Quadrant des protectionsI :
1 volume � prot�ger
L�attaqu� a 5 zones � prot�ger ; chaque zone a
un niveau de difficult� diff�rente :
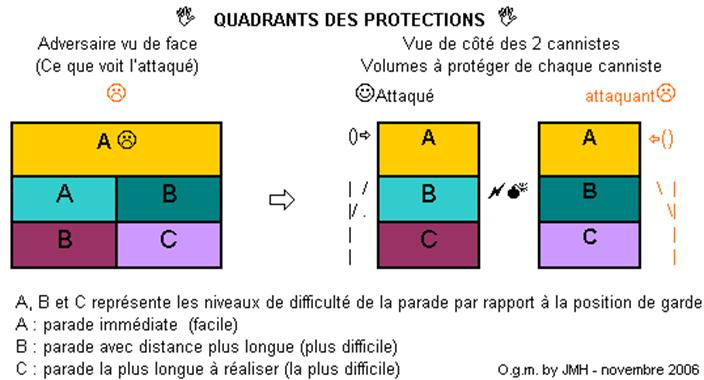
La zone de feux est la zone pr�visionnelle
d�attaque.
Le volume sup�rieur
est attaqu� par le bris� ou le crois� t�te
Les 2
volumes m�dians sont attaqu�s par le lat�ral ou le lat�ral crois�
Les 2 volumes inf�rieurs sont attaqu�s via la fente
avant et avec le lat�ral ext�rieur, le lat�ral crois� , le crois� bas et
l�enlev�.
Ce volume doit �tre prot�g� par une deuxi�me sph�re
de d�tection, rapproch�es celle-ci et non estim�e. (le quadrant de des menaces
avait d�tect� l�attaque pr�visionnelle ou pas�)
3.6.2.3/ Quadrant des positions de l�adversaire L : d�o� vient l�adversaire ?
L�attaqu� peut recevoir une attaque des 4 points
cardinaux (vue de dessus) :
Zone prot�g�es / zones non prot�g�es
La zone de face est la zone principale du champ de
vision : elles est bien prot�g�e. Les autres zones ne sont pas prot�g�es.
1 analyse � 1 strat�gie
Strat�gie �l�mentaire offensive : Se d�placer pour
aller dans un des 3 quadrants de position adverses non prot�g�es (quadrants 2
ou 3).
Strat�gie �l�mentaire d�fensive : L�attaqu�
doit se recaler afin de retrouver syst�matiquement l�adversaire dans son
quadrant 1. Cet automatisme fait partie de �Automatisme de suivi de
l�adversaire��
Quadrant et distances de confrontation
o
on se trouve dans le
quadrant 1 : c�est le cas d��cole
o
on se trouve dans le
quadrant 2 (lat�ral de l�adversaire)
�
distance de touche : action
imm�diate � r�aliser
�
distance de
vigilances : action imm�diate � r�aliser avec un d�placement
�
distance de r�cup�ration :
avec le temps n�cessaire au d�placement, la position de l�adversaire aura
vraisemblablement chang�, il se sera peut-�tre plus dans son quadrant non
prot�g�
o
on se trouve dans le
quadrant 3 (derri�re l�adversaire)
�
distance de touche :
action imm�diate � r�aliser en lat�ral bas par exemple
�
distance de
vigilances : action imm�diate � r�aliser avec un d�placement
�
distance de
r�cup�ration : m�me avec le temps n�cessaire au d�placement et m�me si la
position de l�adversaire change, l�attaque est possible car m�me s�il se
d�place, il se sera peut-�tre encore dans un quadrant non prot�g� (le quadrant
de protection passe de 3 � 2).
Comment se d�placer ?
o
D�placement court :
un pas en avant (naturel) / un pas en arri�re (naturel) / un pas chass� (�
acqu�rir)
o
D�placement long : le
fente avant / la fente arri�re / la volte (les 3 sont � acqu�rir)
Par quelle techniques se
d�placer ?
o
Pour aller du quadrant 1
vers les quadrants 2 (lat�raux) : Volte sans changement de main, volte
avec changement de main, marche avant, marche avant crois�e, fente avant ,
fente avant crois�e
o
Pour aller du quadrant 1
au quadrant 3 (arri�re) : Somme de 2 d�placements au choix :
1ER DEPLACEMENT 2�me
DEPLACEMENT
volte
sans changement de main volte
sans changement de main
volte
avec changement de main + fente avant
marche
avant du c�t� de la canne marche
avant du c�t� de la canne
marche
avant crois�e marche
avant crois�e
3.6.2.4/ Utilisation des 3 quadrants de combat
Tactique d�fensive
On a en visuel le quadrant des menaces (�) pour pr�voir l�attaque adverse (zone
SUP, MED ou INF + information c�t� de l�attaque pr�visible Gauche ou Droite) OU
pour conna�tre les zones libres � attaquer.
En pr�voyant l�attaque, on conna�t la zone du quadrant
des protections (I) qui
va �tre touch� (zone A, B ou C). Cela permet une action de parade/esquive ET contre
attaque en fonction du quadrant des menaces (�) , quadrant o� l�on prend l�information ��zone
libre � attaquer�� (le compl�mentaire de la zone occup�e SUP, MED ou INF +
information c�t� libre (le compl�mentaire du c�t� de l�attaque pr�visible) �
r�cup�rer.
Tactique offensive
On construit, on mod�lise le quadrant des positions
de l�adversaire (L)
pour calculer les zones g�ographiques non prot�g�es de l�adversaire et se
d�placer en cons�quence.
La volte lat�rale permet de se retrouver dans la
partie 2 du quadrant des positions de l�adversaire (voire la partie 3) ;
On a en visuel son quadrant des menaces (�) pour pr�voir l�attaque adverse OU pour conna�tre
les zones libres � attaquer
Avec ces 3 quadrants, on peut �laborer une strat�gie �l�mentaire � SI� ALORS� �. Avec
des SI on r�alise ALORS de l�anticipation et une mini strat�gie de combat.
Remarque
La canne-chausson utilise jusqu�� 2 quadrants de
menace active. La savate en utilise couramment 2 presque en simultan�,
exceptionnellement 3 pour les plus dou�s.
3.6.2.5/ Gestion des flux d�information li�s � ces
quadrants
Il est indispensable d�avoir une information
�pur�e, synth�tique venant de ces quadrants.
Un compromis de r�glage est � trouver entre la non d�tection et la
fausse alarme sil le r�glage est trop fin.
3.6.3/ La
grande question : quel d�placement choisir ?
Cette mod�lisation des 3 quadrants donne donc un
fil directeur pour g�rer les d�placements. Le d�butant ne sait pas toujours comment
se d�placer.
Casser et d�placer l�axe de
combat : pourquoi ?
Tactique offensive : ��trouver
une faille ailleurs��
-
Casser l�axe de combat
revient � changer de quadrant des positions. Le d�placement vers le quadrant 2
ou 3 permet le d�calage et le d�bordement
de l�adversaire, on se retrouve dans la capacit� d�attaquer un quadrant qu�il
prot�ge peu ou pas.
Tactique d�fensive de reprotection
3.6.3.1/
Tactique d�fensive de reprotection Quadrant 2 : rester � distance de
touche ou passer en distance de vigilance
Lorsque le canniste a son adversaire dans le
quadrant 2 alors il est ��accroch� radar�� par son adversaire. Il ne peut pas
parer, il doit imp�rativement effectuer une man�uvre d��vitement pour se
reprot�ger sinon il prend une touche.
-
Si
l�adversaire se retrouve dans notre quadrant 2 ou 3 (il a cass� l�axe de combat
en utilisant la tactique offensive d�crite juste au dessus) Alors nous devons nous d�placer afin de rendre ce
quadrant de nouveau prot�geable, l�adversaire doit r�appara�tre en quadrant 1.
On peut appeler cette action l�algorithme de
REPROTECTION.
-
Quelles sont les man�uvres
d��vitement ?
Manoeuvre 1
-
marche avant (2
pas) : facile mais d�placement peut �tre pas assez long, de plus le
quadrant 2 est toujours ��accroch� radar��.
-
Volte en
avan�ant et en contournant l�adversaire : On se repositionne avec un
quadrant 1des positions de l�adversaire (L). �L�accroche radar�� a �t� �limin�e.
Man�uvre2
-
Esquive, saut,
volte sur place : d�licat, n�cessite une bonne coordination interne.
Man�uvre 3
-
Marche
arri�re (2 pas) : plus d�licat, plus lent et plus court mais on peut
presque arriver � repasser dans le quadrant 1.
-
Volte en
reculant et en contournant l�adversaire : On se repositionne avec un
quadrant 1des positions de l�adversaire (L). �L�accroche radar�� a �t� �limin�e.
Man�uvre 4
-
Volte
spectaculaire : n�cessite une tr�s bonne condition physique et de bons
appuis tr�s long.
Le choix de la volte sans changement de main ou de
la volte avec changement de main d�pend de l�appui sur lequel le canniste est
d�j�. Pour aller vite il ne peut pas changer d�appui, il doit volter sur l�axe
de rotation de son appui.
Coupl� avec le mode �algorithme sans m�moire de
combat�� et la riposte instinctive, on peut d�j� s�amuser un peu�
3.6.3.2/ Tactique d�fensive
de reprotection Quadrant 3 : passer en distance de vigilance ou se replier
en distance de r�cup�ration
Lorsque le canniste a son adversaire dans le
quadrant 3 alors il est ��accroch� radar�� par son adversaire. Il ne peut pas
parer, il doit imp�rativement effectuer une man�uvre d��vitement pour se
reprot�ger sinon il prend une touche. De plus il est aveugle, il n�a plus aucun
visuel sur son adversaire.
-
Quelles sont les man�uvres
d��vitement ?
Manoeuvre 1+ Man�uvre 3
-
Volte lat�rale :
Le canniste passe en distance de vigilance.
Man�uvre2
-
Marche
avant (plus de 2 pas) : on change la distance de confrontation
(distance de r�cup�ration), c�est la ��retraite de Russie��.
-
Volte en
avan�ant : on change la distance de confrontation (distance de vigilance), c�est
le replis strat�gique. On se repositionne avec un quadrant 1des positions de
l�adversaire (L). �L�accroche radar�� a �t� �limin�e.
Man�uvre 4
-
Marche arri�re
puissante et volontaire :n�cessite une tr�s bonne condition physique et de
bons appuis tr�s long.
Casser la distance :
pourquoi ?
Changer de distance de
confrontation : distance de touche / distance de vigilance / distance de
r�cup�ration
Dans le quadrant 2, on g�re la distance de ��distance
de touche�� � ��distance de vigilance��.
Dans le quadrant 3 : on passe souvent en
distance de r�cup�ration. En effet on n�a plus aucun visuel sur l�adversaire,
on est donc aveugle � ses attaques.
3.6.4/ Synth�se des mol�cules ADN
Quelques algorithmes offensifs de bas niveau :
-
La canne est dans un
quadrant de protection. Un algorithme de bas niveau donne une s�quence offensive d�une attaque
dans un autre quadrant de protection. C�est l�algorithme le plus �l�mentaire.
-
La canne est dans un
quadrant de protection. Un algorithme de bas niveau donne une s�quence offensive d�attaques
multiples (par exemple habitus H-B ou V-H�)
-
La canne est dans un
quadrant de protection. Un algorithme de bas niveau donne une s�quence offensive d�attaques
multiples avec d�placement
Le canniste ne change pas d�id�e � partir du moment
ou il enclenche l�attaque ; il ajuste simplement sa distance de frappe. La
m�thode a pour avantage d��tre simple.
Limite de la m�thode : pour ajuster la
distance on est parfois amen� � changer d�attaque�
3.7/ -
-
3.8/ Automatisme :
Comment le d�r�gler ? M
La canne de combat n�cessite une acquisition
importante d�informations. Pour d�r�gler l�automatisme il faut donc :
-
Ne pas donner
d�information aux capteurs,
-
Donner tardivement
l�information aux capteurs,
-
Rompre l�acquisition de
l�information
-
Donner des mauvaises
informations aux capteurs
-
Maintenir une incertitude
de positionnement
-
Leurrer les capteurs
-
Saturer les capteurs et
l�acquisition des donn�es
-
Vider l��nergie n�cessaire
au fonctionnement du syst�me
Le combat de canne est donc une
guerre �lectronique.
Ne pas donner d�informations aux capteurs (RAS /
��� l�ouest rien de nouveau��)
-
mouvement ��neutre��
porteur de peu d�informations � plusieurs sorties possibles : incertitude
maximale sur le mouvement en cour
Rupture de l�information arrivant aux capteurs :
c�est l�avion furtif
-
rep�re visuel
momentan�ment absent : coup tournant, vrille, l�adversaire arrive du n�ant ;
l�attaquant est dans le quadrant 3.
-
rupture d�action
Incertitude de positionnement : la technique
de gu�rilla
-
saut + bond + d�placement
erratiques / d�placement rapide difficile � suivre : : ou
est-il ?
Donner des mauvaises informations aux
capteurs : d�sinformation de l�adversaire
-
feintes de�
-
rupture de distance :
avancer, reculer, avancer, reculer�
Leurrer les capteurs
-
perte de r�f�rentiel de
d�placement de l�adversaire : l�automate ��ne sait plus ou il habite��.
Saturer les capteurs : ��contre-mesure
�lectronique��
-
mouvements rapides
apparemment ��gratuits�� de la canne : manipulations diverses, changements
de main, les majorettes�Physiologiquement le temps de r�ponse adverse augmente.
On le voit tr�s bien en b�ton ; lorsqu�on ex�cute de grands moulinets
rapides, le b�tonneux d�butant peut �tre t�tanis� par la puissance d�impact
potentiel.
-
avancer / reculer�
-
mouvements amples de
balancier d�horloge francontoise
-
��fixer�� l�adversaire par
des attaques multiples.
-
D�passement des
limitations d�un �tre humain
Energie d�pens�e
-
sans �nergie le capteur ne
fonctionne plus : fatiguer l�adversaire
-
Se d�placer n�cessite une
�nergie cons�quente
Une interpr�tation toute
personnelle du vide de l�esprit Zen
- une m�moire vide permet une acquisition en temps
r�el des donn�es, l�info est trait�e imm�diatement, une r�ponse est donn�e, la
m�moire imm�diate est de nouveau pr�te � acqu�rir de nouvelles informations~ ~
~
3.8/ CONCLUSION PARTIEL
Le fait qu�il y ait plusieurs modes de niveau
d�automatisme de combat montre bien que l�on peut pratiquer la canne �
plusieurs niveaux. Le premier mode ��automatisme sans m�moire de combat�� peut
d�j� contenter bon nombre de pratiquants, ils peuvent d�j� prendre pas mal de
plaisir dans ce premier niveau.
Le temps pass� ��� faire avec l�autre�� est bien
plus important que le temps pass� ��� faire contre l�autre��. Le plus haut
niveau d�expertise de ce type d�automatisme est justement le travail
collaboratif qui demande un savoir-faire d�j� consc�quent. Le travail
collaboratif avec un partenaire de jeu reste la meilleure construction des
automatismes du canniste. D�ailleurs, l�apprentissage automatique par les
��syst�mes de classeur�� l�a d�montr� de mani�re significative : avec un
bon canniste le syst�me fait rapidement de gros progr�s.
Un mode hybride conjuguerait mode r�actif avec mode
d�lib�ratif.
4/
DELIRIUM OU REALITE ?
4.1/ Pourquoi
un automate de combat � Quel type d�automate?
Malgr� le volume important de combinaisons, la
canne de combat est tr�s architectur�e. Ainsi les r�gles pr�cises sont ��non
ouvertes��, rigoureuses et mod�lisables. De plus d�cortiquer les tactiques de
combat permet de progresser soi-m�me et de d�couvrir d�autres facettes de ce
sport.
R. Brooks a cr�� un robot
essentiellement r�actif en mod�lisant les r�actions animales : il l�a
appel� l�animat (Animal Automatique ou AA)
Le canniste mod�lis� par un automate
donne le cannaumat. Le cannaumat est un automate sp�cialis�.
Ce combattant d�riv� du
virtuel ressemble �galement au Hotbot
des jeux vid�o � tr�s sophistiqu�s � ce
jour : ce peut �tre un cannhotbot ou canbot.
4.2/ Les
lois de la robotique et la protection du partenaire
J�ai volontairement remplac� le mot adversaire
utilis� jusqu�ici, par le mot partenaire afin souligner l�importance de ce chapitre.
Isaac Asimov, auteur de Science Fiction et
��vulgarisateur scientifique�� s�est beaucoup int�ress� aux interactions et �
la d�ontologie entre le robot et l��tre humain. Il en a retir� 3 pr�ceptes
qu�il a �rig�s au rang de loi universelle du futur.
Ces 3 ��lois�� s��noncent ainsi :
Loi 1 � int�grit� �tre humain � :
Un robot ne peut porter atteinte � un �tre humain ni, restant passif, laisser
cet �tre humain expos� aux dangers.
Loi 2 � Humain a toujours raison � :
Un robot ob�it aux ordres donn�s par les �tres humains, sauf si de tels ordres
sont en contradiction avec la premi�re loi.
Loi 3 � int�grit� robot � :
Un robot doit prot�ger son existence dans la mesure ou cette protection n�est
pas en contradiction avec la premi�re ou deuxi�me loi. La loi 3 recouvre la
parade ou l�esquive.
Combattre avec ma�trise
et dignit�
Si l�on rapproche ces lois
aux notions de respect du partenaire et de son int�grit� physique on obtient un
automatisme suppl�mentaire beaucoup plus fin et d�licat que les pr�c�dents :
le Mode replis
��protection du partenaire��.
La notion de dignit�- elle-
n�est pas encore mod�lisable.
Notes sur le concept visionnaire d�Asimov
Les robots de combat existent aujourd�hui et sont
d�velopp�s par toutes les puissances technologiques ; les mod�les sont
vari�s (2 pattes, 4 pattes, 6 pattes, � chenilles, rampants, roulant, volant�).
Ils sont tr�s sp�cialis�s (le bigdog, quadrup�de, tenterait de porter le
paquetage du soldat am�ricain par exemple).
Mais ils
progressent en sophistication � grande vitesse depuis les ann�es 2000�et
rappelons que les ��lois�� de la robotique d� Isaac Asimov n�ont pas encore �t�
vot�s par les Etats...
Philosophiquement le robot
est consid�r� � l�unanimit� comme un esclave. Mais il devient intelligent cet
esclave�
4.3/ Un
automatisme suppl�mentaire : le mode replis ��protection du partenaire��
De mani�re simple on peut dire qu�il y a danger
pour le partenaire si :
-
le partenaire a fait
tomber sa canne, son casque, ses protections
-
le partenaire est tomb�
-
le partenaire a ses lacets
d�nou�s
-
il y a t�lescopage avec
l�adversaire
-
la frappe arrive sur une
zone interdite : l��tre humain a la capacit� d�annuler ou de r�duire la
force de sa frappe avec une vitesse de r�action quasi instantan�.
-
la frappe est trop
forte : des limiteurs d�effort (par exemple) doivent �tre int�gr�s d�s la
conception et �viter la casse.
La notion de protection du partenaire est un
concept ouvert, les cas possibles sont
difficilement �num�rables (environnement dynamique). La loi 1 � int�grit�
�tre humain � recouvre cette notion.
Fonctionnement et arr�t intempestif du process de
protection du partenaire
En combat, si le mode replis ��protection du
partenaire�� vient a �tre d�sactiv� (volontairement ou pas), le partenaire
n�aura pas connaissance du danger qu�il est susceptible d�encourir alors.
La complexit� de cette notion montre d�j� que ce
process est/sera gourmand en temps de calculateur, le temps de r�action sera
donc � coup s�r p�nalis�.
Pour palier � ces d�ficiences �ventuelles, il
s�av�re donc plus efficace d�int�grer ces notions directement dans les autres
process lorsque c�est possible.
Sans ce process de ��protection du partenaire��, le
jouet d�entra�nement devient rapidement une arme de guerre (toute proportion
gard�e). La loi 2 � Humain a toujours raison � est l� � arr�t
d�urgence � du syst�me
4.4/ Faisabilit�
d�un automate de combat @
4.4.1/
Gestion de l�information visuelle : extraire et nettoyer
4.4.1.1/ Extraire des
informations
Des informations visuelles
doivent �tre extraites du flux vid�o afin de trouver au minimum la position de
la canne et les �paules de l�adversaire.
Tr�s r�cemment
un constructeur d�appareil photo num�rique a int�gr� une fonction
� d�tection des visages �, 10 visages d�tect�s simultan�ment en 0,05
secondes (dixit publicit� Fujifilm). Ce m�me algorithme peut selon toute
vraisemblance �tre adapt� pour la reconnaissance automatique de la position de
la canne adverse par exemple. Il est m�me � pr�voir que l�algorithme sera plus
simple � r�gler. La d�tection d�un semblant de rectangle ou d�un semblant de
trap�ze tronqu� est suffisante pour reconna�tre une canne. Un syst�me de
classeur pourrait g�rer la banque d�image initiale utilis�e pour la d�tection
afin d�augmenter la fiabilit� de la reconnaissance.
Dans un premier temps ce traitement doit
s�effectuer � posteriori. Les informations enregistr�es au cours du combat sont
ensuite trait�es apr�s le combat et int�gr�es pour le combat suivant.
Les nouvelles techniques d�encodage vid�o (avec la
norme H.264 par exemple) devraient am�liorer la compression des images et
all�ger leur traitement.
Le constructeur Honda a
d�velopp� un robot capable de :
-
interpr�ter
les postures
-
interpr�ter
les indications (suivre une direction indiqu�e par la main)
-
identifier
des visages
Ce robot conna�t les notions
:
-
identification
de maintien
-
identification
de geste
-
identification
de l�environnement
-
identification
des bruits
4.4.1.2/ Nettoyer des
informations visuelles : � d�bruiter � le signal vid�o entrant
Habituellement l�arri�re plan est fixe et le sujet
est en mouvement. Or si le capteur d�acquisition vid�o est embarqu� sur le
cannaumat l�arri�re plan est mobile et
le canniste adverse pr�sent au premi�re plan doit �tre globalement �tre
poursuivi dans la mire d�acquisition. Ce type de traitement vid�o et de
poursuite de cible est tr�s au point dans les retransmissions de match de
football
4.4.2/ Que
faut-il pour r�aliser un automate de combat ?
- Une centrale inertielle ?
-
Info Ang : Information de la
position angulaire dans l�aire de combat - l�automate de combat doit retrouver
le ��nord�� apr�s une volte. La centrale inertielle 3 axes donne 3 informations
d�acc�l�ration et 3 vitesses angulaires.
-
Des automatismes
ind�pendants de ��bas niveau�� peuvent �galement permettre de retrouver une
stabilit�. Ils seraient moins on�reux qu�une centrale inertielle. Un
inclinom�tre 2 axes permet de fournir l�information d�attitude du robot avec
les angles de roulis et de tangage).
-
Vit Rot Un gyrom�tre � fibre
optique peut mesure la vitesse de rotation du robot
- Des capteurs performants
Capteurs adapt�s (sp�cifiques
et simples si possibles) : percevoir le minimum n�cessaire � sa fonction
(�viter le trop plein d�information)
Gestion
de la distance
-
Info Dis (information de distance relative entre les
combattants) : laser de mesure de longueur (4,5� � Casto) ou par radar,
t�l�m�tre laser. Un laser SIK balayant � 180� peut aider � l�anticollision
-
Info Pos (information de position
de l�adversaire dans l�aire de combat) :
o
1�re solution : Information de
position absolue par GPS + Information de distance relative � l�adversaire (Info Dis)
o
2�me solution : Information de
position angulaire par centrale inertielle + Information de distance relative
de l�adversaire par laser ou radar + information de distance relative au centre
du cercle : triangulation et calcul de de la position de l�adversaire dans
l�aire de combat
-
Info AvR +
Info Vit : capteur �Dopler� : avance
/recule ? :
Gestion des formes
-
Info Sil +
Info epo (information
de silhouette et de la ligne des �paules) : analyseur de forme �
les logiciels existent � mais le process
est long en temps de r�ponse. Pax exemple une cam�ra thermique donne une vision en 2 dimensions des
positions de l�adversaire
o
Le temps [acquisition des
donn�es+reconnaissance de forme] doit �tre r�duit : c�est le principal
probl�me actuel commun � tous les syst�mes de ce genre.
o
Changer de capteur : 1
capteur actif type laser v�hicule des volumes importants de data mais la
surface de r�flexion doit �tre adapt�e. Le noir peut leurrer facilement le
capteur ; on voit d�j� la contre-mesure possible�
-
La limitation vient des capteurs, elle est pr�vue jusqu�en 2025 au minimum. L�homme reste le senseur
le plus perfectionn�.
-
C�est la 1�re difficult�.
-
Exemple
de cam�ra de vision artificielle : cam�ra industrielle d�identification
automatique de type SIMATIC VS xxx
construite par RVI Acuity Cimatrix Siemens - identification automatique � haute cadence
en 2D, calibr�e par apprentissage.
-
La
st�r�ovision ��bas�e pixels�� semble est une m�thode d�analyse prometteuse.
-
Un
constructeur d�appareils photo num�rique vient tr�s r�cemment de commercialiser
un analyseur et un chercheur automatique de visage en moins de 0,01s.
La
logique commune de reconnaissance de forme commune aux constructeurs est la
m�morisation par apprentissage des �l�ments ou des mouvements � reconna�tre.
- De bons calculateurs
-
Mutiprocesseur : .le
temps de r�action doit �tre tr�s court en canne de combat, c�est le param�tre
clef
-
Intelligence distribu�e
souhait�e : syst�mes multi-agents
-
Exemple de PC
compact : ordinateur utilis� dans les process industriels sans disque dur (r�sistant
aux choc et aux vibrations) de type SIMATIC Microbox T (avec une CPU 317T) d�velopp�
par SIEMENS. Avec 8 sorties Tout Ou Rien (TOR) rapides int�gr�es et ses
syst�mes de contr�le de t�che de positionnement et de synchronisation, il est
d�j� capable � de base - de commander d�j� le mouvement de quelques
actionneurs sans d�veloppement sp�cifique.
- Des logiciels, des algorithmes et des
asservissements
-
Logiciel d�analyse de
trajectoire d�impact : existe � fiable et performant
-
Algorithmes de choix de
r�ponse : si les entr�es d�informations ne sont pas trop volumineuses, le
g�nie logiciel est capable de r�aliser des syst�mes tr�s performants et tr�s
rapides.
-
Analyseur de forme :
o
Info Can :
trouver la canne
o
Info
Epo : trouver la ligne des �paules
o
Info
Bras : trouve la position du bras offensif
(crois� ou pas)
-
Automatisme
de suivi de l�adversaire
o
DisComb :
Consigne de la distance de combat � respecter (distance de touche/courte,
vigilance/moyenne et de r�cup�ration/longue). Un changement de la consigne de
distance de combat peut intervenir en cours de combat. L�interruption de la
consigne peut venir d�une arr�t de s�curit� ou d�un changement dans la
tactique. La modification de consigne vient d�un algorithme de niveau sup�rieur
-
Automatisme
d�ajustement du coup
o
Le coup doit �tre ajust�
pour toucher au bon endroit (t�te, flanc, bas) sans toutefois modifier sa
trajectoire globalement verticale ou globalement horizontale. Des d�tecteurs de
proximit� doivent permettre un freinage, une acc�l�ration ou un arr�t du coup.
La modification de consigne (arr�t de s�curit� notamment) vient du niveau
sup�rieur (freinage = feinte, acc�l�ration = changement de rythme).
o
Ce r�glage par ��variable
de glissement instationnaire�� permet de modifier en temps r�el la vitesse de
convergence. L�information est issue du capteur de proximit�. Ce nouveau
concept d�automatisme de �suivi de
chemin avec phase transitoire r�active�� est riche en d�veloppements possibles.
o
Probl�matique de
l�impact : un coup appuy� par l�adversaire sur la canne , lors d�une
parade par exemple doit �galement �tre r�gul�e en effort sinon l�automate peut
�tre d�stabilis�.
- Architecture entre les asservissements�
Les
automatismes ind�pendants r�gissant une fonction �l�mentaire sont aujourd�hui
l�gions dans le monde de la voile de comp�tition. Ils sont born�s dans leurs
capacit�s mais r�alisent de mani�re tr�s sp�cialis�e et optimis�e des fonctions
pointues. Ils sont autonomes, ind�pendants des autres calculateurs mais peuvent
recevoir un ordre sup�rieur d�arr�t/marche forc�e. Cette logique de
fonctionnement pourrait �tre appliqu�e au Cannaumat afin d�en augmenter la
vitesse de r�action L�automatisme de suivi de l�adversaire est le cas typique
d�automatisme d�coupl� du reste sauf dans l�attaque ou le calculateur sup�rieur
reprend les commandes pour associer d�placement et attaque.
- Automatismes li�s aux d�placements afin de
garder les zones de frappe et la cin�matique humaine
-
Associer
le d�placement du bloc �nergie roulant au d�placement des jambes est indispensable afin de conserver les zones de
frappe (associer fente avant � avance des membres inf�rieurs et longueurs de
d�placement associ�e ainsi que la descente du corps pour qu�il se retrouve �
hauteur de fente).
o
1
pas = x tours de roue via un odom�tre par exemple
o
recalage
de la position gr�ce au capteur donnant l�information de distance Info Dis.
o
Contrainte
compl�mentaire dans la consigne DisComb (distance de combat) : rester dans le
cercle (Info Pos, Info Ang ). Un calcul de triangulation est n�cessaire. La
notion de quadrant de combat peut intervenir �galement ici.
-
Un
mouvement commenc� est termin� et principalement les mouvements de d�placement.
En effet, l��tre humain ne peut s�arr�ter au milieu d�un mouvement pour en
commencer un autre.
Comparatif
avec la savate :
-
Encha�nements poing-pied :
n�cessit� de reculer pendant l�encha�nement
-
Encha�nement
pied-poing : n�cessit� d�avancer pendant l�encha�nement
==> 1 automatisme li� �
la technique pure + 1 automatisme de r�gulation de la distance.
- Une cin�matique (un porteur) in�dite.
-
La cin�matique d�un tel
automate laisse r�veur. les japonais s�y essaient depuis 15 ans�� petit pas
-
Les mouvements doivent
�tre rapides. La cin�matique et l��nergie motrice doivent permettrent cette
rapidit�
-
Certains mouvements
doivent �tre arr�t�s rapidement d�o� un dissipassions de chaleur par frottement
-
C�est la 2�me difficult�
Des pistes pour un
��porteur�� avec une cin�matique performante :
Pour r�agir vite le
syst�me cin�matique doit �tre instable.
En a�ronautique militaire
les chasseurs sont hautement pilotables car ils sont particuli�rement instables
en vol, ce qui leur permet d�effectuer des mouvements impensables avec une g�om�trie
classique (voir F117 par exemple). Les
commandes de vol �lectriques permettent de piloter ces fers � repasser du ciel
avec un calculateur puissant. En partant de cette m�me logique l�automate de
combat doit avoir une g�om�trie instable pour pouvoir �tre pilot� et r�agir
tr�s rapidement.
Un robot sur 2 roues
pilot�es/1 axe a �t� d�velopp� et il est
op�rationnel � ce jour.
Un robot ��compas��
utilise le principe de la marche passive (la gravit�)�
Un robot sans pied
permettrait de g�n�rer des mouvements qualifi�s de ��hautement dynamiques��, la
marche rapide, la course, le saut (voir robot RABBIT). Ce syst�me cin�matique a
de forte analogie avec les nouveaux avions de combat. De la m�me mani�re il est
hautement instable et d�licat � piloter mais il r�agit vite. De plus il serait
�nerg�tiquement �conomique.
Un ��porteur�� adapt� � son environnement :
Le terrain sur lequel
�volue l�automate est plan, sans obstacle � franchir. Un v�hicule avec 4 roues
motrices �quip�es de pneus est amplement suffisant. De plus, ce type
d�architecture a la qualit� d��tre rapide dans un environnement non escarp�
comme une aire de combat dans un gymnase.
- Energie embarqu�e.
-
Pas de fil possible
-
Estimation de l�autonomie
n�cessaire : 15 minutes � ce n�est pas monstrueux
-
Puissance et
amp�rage : � d�finir en fonction des mat�riel embarqu�s et du nombre
estim� de mouvements �l�mentaires r�alis�s durant le combat.
-
L�g�ret�
-
Tenir 3 minutes ne doit
plus �tre un probl�me pour les batteries.
- Optimisation des informations � recevoir et �
traiter
-
Listing des param�tres UTILES
-
Etablir si les param�tres sont ind�pendants, ou li�s
entre eux par un calcul simple (pertinence des param�tres retenus) :
simplifications �ventuelles
-
Associer un capteur � un param�tre : quelles
sont TOUTES les informations qu�on peut en d�duire RAPIDEMENT.
4.5/ Exemple
de prototype de Cannaumat
[dessin Prototype de Cannaumat]
Cannistique
-
tenue
matelass�e peu pratique : remplac�e par un plastron type Taekwendo pour la
zone de frappe en flanc
-
jambi�re
type protection karat� pour les zones de frappe basse
-
1
casque de canne de combat prot�geant le capteur visuel
-
capteur
visuel : un cam�ra thermique (monoscopique 2D) [inop�rant contre un autre
cannaumat]
-
6
moteurs �lectriques pour les membres sup�rieurs
-
2
moteurs �lectriques pour les membres inf�rieurs
Syst�me
de d�placement
-
Porteur
de type Rover (exemple Robot DALA, robot tout terrain de mod�le ATRV de la
Soci�t� IRobot)
-
Pas
de roue directionnelle : le robot tourne en appliquant un diff�rentiel de
vitesse sur les roues droites et gauches
-
4
pneus � forte adh�rence pour d�placer le porteur
-
Vitesse relative calcul�e
par 4 capteurs odom�triques (1 codeur optique par roue pour mesure la vitesse
des roues)
-
Jeux
de batterie (vraisemblablement de type stationnaires)
-
Plaque
de fonte ou de plomb pour la stabilit�
-
Syst�me
de motorisation + bloc �nergie
-
Ordinateur
portable ou Pc industriel : calculateur intelligent : on pourrait le
d�porter hors de la zone de combat avec une communication sans fil. Au regard
du poids actuel des pc, il n�est gu�re plus difficile de l�embarquer.
-
Porteur
en aluminium
Aujourd�hui, il est certain que les diff�rentes
technologies n�cessaires � la r�alisation d�un cannaumat existent. Il me semble
m�me qu�elles vont m�me au-del� de mes pr�visions les plus optimistes.
La premi�re difficult� r�side dans leur
int�gration, la deuxi�me difficult� r�side dans le temps de r�action disponible
pour r�pondre � un �tre humain. Les autres difficult�s ne sont que des
probl�mes techniques de sp�cialiste.
De plus, les diff�rentes technologies n�cessaires �
ce cannaumat ont �t� d�velopp�es aux 4 coins de l�Europe, la difficult� est l�int�gration
de ces diff�rents savoirs.
4.6/ Outils
intelligents & cyborg
Les machines-outils sont des
robots industriels class�s dans les robots de 1�re g�n�ration.
Aujourd�hui nos outils
intelligents (ils ont une composante robotique) ont une facult� d�autonomie et
d�adaptabilit�, ils sont de 2�me g�n�ration
Apr�s-demain le robot
utilisera des outils.
Entre l�automate totalement autonome et
aujourd�hui, la marche technologique est �lev�e. Mais il existe des �tapes
interm�diaires pour demain.
Demain :
-
L�aide au combat :
aide � la d�cision
o
Les capteurs d�information
visuelle peuvent �tre d�port� de la zone de combat
o
Les informations
recueillies par les capteurs, sont envoy�es au calculateur �galement d�port� de
la zone de combat. Les informations analys�es et synth�tis�es donne une analyse
de la mani�re de combattre de l�adversaire�
o
Une communication sans fil
est r�alis�e avec le combattant.
o
Le combattant recueille
l�analyse gr�ce � son casque avec
visi�re plastique. Cette derni�re peut
servir de collimateur t�te haute, technologie �prouv�e en a�ronautique
militaire et recevoir les informations en surimpression sur l�int�rieur plexiglas
de casque. A quelques d�tails pr�s la technologie existe d�j� et est d�j�
�prouv�e.
o
Pas d�interface avec le
calculateur : les donn�es vont du calculateur vers le combattant :
les difficult�s inh�rentes aux interfaces sont ainsi �limin�es
Restera � r�pondre � la
question � Quels sont les param�tres � donner � l�attaquant pour
qu�il puisse profiter de l�expertise automatique ? �
-
Augmenter la performance
du canniste : le cyborg
le cybord est simplement
un �tre humain qui poss�de des parties artificielles (un �il / une puce
�lectronique�). Une puce comprenant une petite base de donn�e pourrait bien faire l�affaire et donner un net
avantage. Il reste simplement le probl�me de la connexion entre la puce et le
cerveau�Ce chemin de d�veloppement rel�ve encore aujourd�hui de la Science
Fiction ou de l�anticipation. Cependant les strat�gies mondiales d�velopp�es
actuellement sont plus proches d�Universal Soldier humain que de Terminator
robotis�.
4.7/ Une plateforme d�s
demain ?
Avant d�avoir une entit� autonome il est plus
raisonnable d�envisager des �tapes interm�diaires.
4.7.1/ Un automate d�entra�nement � 1er
projets
- Dans un premier temps, la plateforme n�a pas
besoin d��tre mobile. Le probl�me de l��nergie
embarqu�e est suspendu avec la possibilit� d�utiliser du 220 V. Dans un but d�entra�nement il n�est pas
n�cessaire qu�il soit tr�s intelligent. Les s�quences peuvent �tre
pr�programm�es.
- Un cannaumat uniquement d�fensif ne sait que
parer. Il n�a besoin d��tre intelligent, il doit simplement effectuer une
parade. Une d�tection de pr�sence et une d�tection de distance sont
suffisantes.
- un cannaumat attaquant : il attaque sans
discernement, il attaque et attaque encore. Je connais des cannistes qui font
�a tr�s bien�
- un cannaumat idiot : il pare et il attaque
sans discernement, sans logique interne. Ca aussi �a se trouve aussi dans la
nature.
4.7.2/ Un syst�me d�aide � la d�cision � conception
du � Visuel combat � - 2�me projet
Un syst�me d�aide � la d�cision permet de mettre au
point les syst�mes de reconnaissances visuelles et toute la cha�ne
d�acquisition de l�information et du stockage. Les moyens � mettre en �uvre
sont limit�s et plus raisonnables.
- acquisition des s�quences de combat
- reconnaissance automatique des mouvements (le
ma�tre-couple du canniste et de sa canne par exemple).
- relev� automatique des mouvements et extraction
automatique de la strat�gie.
- recherche des lois de comportement adverse.
4.7.3/ Un automate d�entra�nement sur une
plateforme fixe � 3�me projet
Le couplage des deux premiers projets permet
d�obtenir un automate d�entra�nement sur une plateforme fixe.
Frank Herbert dans son �uvre Dune avait imagin� un
automate de combat d�entra�nement pour le h�ro devenue demi-dieu et grand
ma�tre, Paul Altr�ide..
4.7.4/ Un porteur mobile autonome � 4�me
projet
C�est le paragraphe 4.8.
4.8/ Vers un automate de combat
autonome ?
L�algorithme de combat met en �uvre un nombre de
process important. Des processeurs sp�cialis� d�di�s � chaque t�che, � chaque
automatisme travaillant en parall�le peuvent r�gler le probl�me du temps de
r�ponse. Un processeur ma�tre aurait son process de meneur de jeux. C�est de
l�intelligence artificielle dans toute sa complexit� qui appara�t.
Prises s�par�ment les difficult�s ne sont pas
insurmontables, la cin�matique high-tech existe, le g�nie logiciel cr�� tous
les jours des algorithmes d�une complexit� d�passant l�entendement d�un
individu seul. Mais l�int�gration de l�ensemble n�cessite un saut
technologique. L�automate humain a encore de beaux jours devant lui.
L�aide au combat et � la d�cision est une �tape
envisageable � tr�s court terme.
[Dessin ; Canne
Office�]
4.9/ Combat contre un
cannaumat : le secret de Shaolin red�couvert au XXI�me si�cle ?
L��preuve de sortie pour un moine Shaolin �tait le
� couloir de la mort �. L�expert en arts martiaux devait valider ses
longues ann�es d�apprentissage en r�ussissant une derni�re �preuve, il devait
sortir sain et sauf du � couloir de la mort � (source Roland
Habersetzer). En r�alit� le moine guerrier devait affronter des automates
rudimentaires r�gl�s avec plus ou moins de duret� et plus ou moins de rapidit�.
Les Ma�tre r�glaient la duret� des automates ; et donc ils d�finissaient l�obtention
ou pas du tirte prestigieux de moine de Shaolin. Si le disciple n��tait pas sur
la bonne voie, le � couloir de la mort � se chargeait de rectifier le
chemin.
5/ CONCLUSION
En d�butant cette �tude, je n�avais q�une vague
id�e de la richesse d�algorithmes que j�allais mettre au jour. Ils sont
apparus, cach�s dans des habitudes diverses et souvent non mises en valeur dans
le volume des param�tres � g�rer au cours du combat.
J�ai d�couvert �galement qu�un projet tel que le
cannaumat qui semblait relever de la
Science-Fiction pure est � ce jour � port�e de main si l�on n�est pas trop
gourmand sur le niveau de ses comp�tences. Or avec les d�veloppements de
l�Intelligence Artificielle - et notamment les Hotbots et les syst�mes de
processus adaptatifs - on doit pouvoir arriver � des r�sultats spectaculaires.
Le goulot d��tranglement se trouve plut�t du c�t� des capteurs d�information et
du traitement de l�information visuelle. Cependant, au cours de ces derniers 18
mois, des progr�s consid�rables ont �t� r�alis�s dans le domaine du traitement
visuel.
Tous les jours, de nouveaux projets li�s �
l�intelligence artificielle exp�rimentale et aux process industriels naissent
et aboutissent. Des th�ses de plus en plus �labor�es sur l�Intelligence
Artificielle sont coupl�es � des
r�alisations exp�rimentales op�rationnelles.
La plupart de ces th�se et travaux prennent en
compte un nombre de param�tres bien sup�rieur � ce qui est n�cessaire en canne
de combat (terrains accident�s, environnement ouvert et complexe�). Un �lagage
et une simplification des param�tres ��non utiles�� devraient permettre d�avoir
des outils robustes (au sens de l�automatisme), rapides tout en �tant complets.
Par ailleurs, le monde des jeux vid�o utilise des
plates-formes et des m�thodes qui sont un tr�s bon compromis entre la r�alit�
complexe et la mod�lisation simpliste d�un laboratoire. L��nergie et la mati�re
grise d�pens�es dans ce pan de notre �conomie m�ritent plus qu�un d�tour. Les
chercheurs et les militaires ne s�y sont pas tromp�s, aujourd�hui ces
plates-formes sont reconnues pour leurs qualit�s et utilis�e � des fins non
ludiques.
Donc except�s les capteurs visuels, il n�est plus
question de saut technologique mais la probl�matique est la mise en commun des
moyens, des comp�tences et des ressources diss�min�es un peu partout dans
toutes les sph�res de la recherche et de la technologie industrielle.
J�ai simplement tent� de r�pondre � � qu�est
ce je fais avec ma canne pour toucher l�adversaire �
6/ PROJETS
& AMELIORATION
Un
fil directeur de construction : Perception, D�cision et Action
Pour aller plus loin, des comp�tences
compl�mentaires sont n�cessaires :
6.1/ Am�liorations cannistiques �
apporter
-
Une aide de cannistes
confirm�s serait appr�ci�e. En effet les automatismes �tudi�s ici n�cessitent
des mises au point. Le savoir-faire y joue un r�le central, les
algorithmes doivent s�adapter au mode op�ratoire utilis� par le canniste. La
grande difficult� est justement de d�couvrir ce mode op�ratoire ou plut�t CES
modes op�ratoires. Il n�y a pas UN MODE DE COMBAT mais DES MODES DE COMBAT,
fondamentalement diff�rents suivant les individus.
6.2/ Automatisme, traitement de
l�information
-
De nombreuses th�ories
��fouill�es�� existent d�j� sur � peu pr�s tous les sujets abord� ici. Mettons
en quelques unes en pratique. En effet une th�orie n�est valable que si l�on
peut l�appliquer correctement � du concret !
6.3/ Informatique, algorithmes et
Intelligence Artificielle
-
Les programmes des
algorithmes sont � r�aliser. Des informaticiens motiv�s (ou des sp�cialiste
en I.A) seraient les bienvenus.
-
Analyse d�taill�e des
Entr�es/Sortie avec les actionneurs, liaisons avec les automatismes
-
Etude d�taill�e de
l�architecture distribu�e pseudo-intelligente entre les calculateurs ma�tres et
les multi-agents intelligents.
-
R�aliser des
simulations : valider les algorithmes de combat.
-
V�rifier que l�on se sort
de toutes les situations
-
Simulation Cannaumat contre cannhotbot :
g�n�rer des syst�mes de classeurs pour trouver/retrouver des lois de
comportement efficaces d�encha�nements (r�alisation de syst�mes de classeurs
adapt�s au sujet�)
-
Analyse d�taill�e du
d�placement : mod�lisation du
d�placement, analyse d�taill�e de la cin�matique, lois de d�placement du
porteur ind�pendamment du reste� : application de la logique flou au
d�placement�
-
Mise en �uvre de syst�mes
de classeurs pour red�couvrir le monde du combat canniste via les
algorithmes des processus adaptatifs de derni�re g�n�ration.
o
Comparatif entre le
Savoir-faire cannistique et la ��vie artificielle�� du cannaumat
o
Le choix de sortie d�un
cannaumat est l�entr�e du cannaumat adverse, il voit cette sortie comme une
attaque, il r�agit et sa sortie devient l�entr�e du premier cannaumat�. On
laisse mouliner� et on regarde ce qui se passe dans l�historique m�moris�
!
6.4/ Etude d�taill�e du porteur
de la cin�matique
-
La technologie �volue tous
les jours
-
Quelles solutions
techniques � mettre en �uvre ?
-
Etude approfondie sur les
capteurs
6.5/ D�autres pistes de travail
-
Algorithmes issus du
traitement des Jeux : la notion d�incertitude et de distribution
pseudo-al�atoire des encha�nement peuvent nous sugg�re que la th�orie des jeux peut nous apporter des
compl�ments dans la recherche de solutions.
-
Algorithme par
optimisation des gains : Je pare ou je prends la touche. Mais si je ne
pare pas, je pourrais me placer mieux et placer ensuite plusieurs touches.
Cette logique d�analyse est une optimisation du � chemin �
parcourir �, une acceptation des dommages afin de maximiser les gains. Ce
sont d�autres voies de recherche.
-
Logique floue
-
Automatisme g�om�trique�
JM Henry
- D�cembrer 2006
bfcannevillers@caramail.com
Document disponible au format PDF : version
pdf
� Tout ce qui s�est fait de grand dans ce monde
s�est fait au nom d�esp�rances exag�r�es (Jules VERNES)
& OUVRAGES DE REFENCE '
Cannistique et connaissances
sportives
-
� UN APERCU DE LA TECHNIQUE DE LA CANNE.htm � d�apr�s
Philippe ROUDILLON (Forum Canne Fran�aise - texte en bleu du 02/02/2005
-
Dessin de l�aire de
combat : site web de la R�union canne-reunion.com : merci � Olivier
Sabban
-
� La Canne, arme de
d�fense,sport de combat � par Maurice Sarry
-
� La technique de la
canne et du b�ton � par Philippe CONJAT
-
Articles techniques
o
� La feinte �
par H�l�ne Bourgeois et Bertrand Dubreuil
o
� Traitement de
l�information (D�c 04) �, � La vitesse (D�c 04) �, � Vision
globale : apprendre � voir � par Y Kurtz
o
� La
-
� Cahier N�10 -
Savate B�ton D�fense � FFSBF&DA\CNCCB
-
� Compte-rendu de Stage FPC
Chatel/moselle les 7,8,15 22 mars 2002 � par Jean-Marie JECKER
-
� Emotions
pr�-comp�titives et performance chez les escrimeurs de haut niveau : Etude
comparative du v�cu �motionnel des sportifs d��lite lors de leurs meilleurs et
moins bonnes prestations � rapport de recherche de Nadine DEBOIS (INSEP
Laboratoire de phsychologie du Sport) et Magali CARRIER (F�d�ration Fran�aise
d�Escrime) Juin 2003
-
� Strat�gie visuelle,
jugement et prise de d�cision en Savate Boxe fran�aise (- INSEP - Laboratoire
Mouvement Action et Performance � �uvre collective - 2001
-
� Les M�taphores de
combat du B�tonneux foux � O.G.M. by JMH
Automatismes, algorithmes et
Intelligence Artificielle
-
� Courbes
math�matiques � - Revue de Palais de la d�couverte N� sp�cial N�8 (1976).
-
� Etude de la
performance motrice didactique : quel mod�le mental pour le d�monstrateur
du geste complexe � par Laurent Chaudron � Onera.
-
� Automatisme et
subjectivit� : l�anticipation au c�ur de l�exp�rience �, th�se de
doctorat de l�Universit� Paris 1 � sp�cialit� Philosophie , par Olivier SIGAUD
� 10 d�cembre 2002.
-
� Robotique et
intelligence artificielle � rapport d�activit� � � Laboratoire d�Analyse
et d�architecture des Syst�mes, groupe RIA �
CNRS 1999-2000.
-
� Le contr�le
hi�rarchis� d�un robot marcheur hexapode �, par Paul Alexandre -
Universit� libre de Bruxelle (facult� des sciences appliqu�es � service des
constructions m�caniques et robotique) � 1996-1997.
-
� Localisation et
mod�lisation de l�environnement d�un robot mobile par coop�ration de 2 capteurs
omnidirectionnels, par Cyril DROCOURT � Universit� de Technologie de Compi�gne
� centre de robotique, d��lectrotechnique et d�automatique � 2002.
-
� Programmation d�un
syst�me de vision temps r�el embarqu� sur un robot quadrup�de mobile et
autonome � � Sony / Robocup
-
� Contr�le d�allure
dynamique d�un robot bip�de � l�aide de r�gles pragmatique et de technique
d�apprentissage �, par Christophe SABOURIN � Universit� d�Orl�an �
Laboratoire Vision et Robotique, ENSI de Bourge.
-
� S�lection et
contr�le de mode de d�placement pour un robot mobile autonome en environnement
naturel, par Thierry PEYNOT � LAAS-CNRS
Toulouse
-
� Epique�2003 �
adaptation et contr�le cognitif : supervision de situations dynamiques
complexe �, par Jean-Michelt HOC et Ren� AMALBERTI
-
� Intelligence
artificielle, mais enfin de quoi s�agit-il ? � des chercheurs de
L�institut de Recherche Informatique De Toulouse (IRIT) r�pondent.
-
� R�alit� vituelle et
formation : conception d�Environnements Virtuels P�dagogiques � th�se
de doctorat de l�Ecole des Mines de Paris � sp�cialit� Informatique temps r�el,
robotique et automatique par Domitile LOURDEAUX � 6 octobre 2001.
-
� Comparaison de
syst�me d�analyse du mouvement 3D � rapport de St�phane VIELLENT (INESP
Laboratoire Mouvement Action et Performance).
-
� Vision artificielle
et traitement de l�image � - rapport de veille strat�gique novembre 1999 �
CRIM Centre de Recherche Informatique de Montr�al.
-
� MHiCS,Une
architecture de s�lection de l�action Motivationnelle et Hierarchique � Syst�me
de Classeurs pour Personnages Non Joueurs adaptatifs �, th�se de doctorat
par Gabriel ROBERT � Universit� Paris 6
-
� L�homme, le char et
le robot. Cl�ture de l�espace, connectique et bionique du soldat � par Mr
HENROTIN � Universit� libre du Bruxelle
J REMERCIEMENTS <
-
Les articles
� La feinte � par H�l�ne Bourgeois et Bertrand Dubreuil, le
� Traitement de l�information (D�c 04) �, � La vitesse
(D�c 04) � par Y Kurtz ont �t� les �l�ments d�clencheurs et la source de
donn�es d�origine pour cette recherche de mod�lisation des automatismes. Que
les auteurs en soient remerci�s.
-
Par sa m�thode
d�apprentissage, Alain Gernet � professeur Es canne (entre autres) � m�a permis de mettre au point cette m�thode de
visualisation par zone. Les quadrants de combat ne sont qu�une
extrapolation des cours... Merci � toi ma�tre Alain.
-
Je tiens � remercier
Olivier Dupuis pour m�avoir fait part de ses remarques sur la version 2.3 dans
une fen�tre de son planning d�j� bien charg�.
-
Je tiens �galement �
remercier Fr�d�ric Morin, pr�sident de l�ASCA, pour avoir pris de son temps afin
de relire ce document (version 2.3) et
de m�avoir fait part de ses remarques, avis et commentaires. Ses remarques m�ont
permis de compl�ter et de remettre l�accent sur quelques points que j�avais litt�ralement
pass�s sous silence et qui se sont av�r�s riches � �tudier de mani�re plus d�taill�e.
ANNEXE 1
� ANALYSE COMBINATOIRE DES MOUVEMENTS �
|
1�re approche calculatoire: 6 mouvements diff�rents possibles
[Bris�, Crois� t�te, Crois� bas, Lat�ral crois�, Lat�ral ext�rieur, Enlev�]
|
|
6
|
Mvt r�utilis�
|
Mvt non r�utilis�
|
|
5 (- enlev�)
|
Mvt r�utilis�
|
Mvt non r�utilis�
|
|
4 (- enleve-crois� bas)
|
Mvt r�utilis�
|
Mvt non r�utilis�
|
|
5 mvts /6
|
7776
|
720
|
|
5 mvts /5
|
3125
|
120
|
|
5 mvts /4
|
1024
|
96
|
|
4 mvts /6
|
1296
|
360
|
|
4 mvts /5
|
625
|
120
|
|
4 mvts /4
|
256
|
24
|
|
3 mvts /6
|
216
|
120
|
|
3 mvts /5
|
125
|
60
|
|
3 mvts /4
|
64
|
24
|
|
2 mvts /6
|
36
|
30
|
|
2 mvts /5
|
25
|
20
|
|
2 mvts /4
|
16
|
12
|
|
1 mvt /6
|
6
|
6
|
|
1 mvt /5
|
5
|
6
|
|
1 mvt /4
|
4
|
4
|
|
TOTAL
|
9 330
|
1 236
|
|
|
3 905
|
326
|
|
|
1 364
|
160
|
|
3 mvts
max
3+2+1
|
258
|
156
|
|
|
155
|
86
|
|
|
84
|
40
|
|
1er type
encha�nement / incertitude Haut-Bas)
(3 mvts/6)
|
|
|
|
|
|
|
|
|
32
|
12
|
|
2�me type
encha�nement / incertitude Vertical-Horizontal (3 mvts/6)
|
16
|
8
|
|
|
|
|
|
|
16
|
4
|
|
|
32
|
24
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mise � jour : 11/11/2006
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2�me approche calculatoire: 8 mouvements diff�rents
possibles
lat�ral ext�rieur haut ou bas diff�renci�s (lat�ral crois� haut ou bas) :
[Bris�, Crois� t�te ou haut, Crois� bas ou jambes, Lat�ral crois� (t�te ou
flanc), Fente avec lat�ral crois� bas,
Lat�ral ext�rieur (t�te ou flanc) Fente avec lat�ral ext�rieur bas, Enlev�]
|
|
8
|
Mvt r�utilis�
|
Mvt non r�utilis�
|
|
8+haut au d�but
|
Mvt r�utilis�
|
Mvt non r�utilis�
|
|
4+haut au d�but
|
Mvt r�utilis�
|
Mvt non r�utilis�
|
|
5 mvts /8
|
32768
|
6720
|
|
5 mvts /8
|
20480
|
4200
|
|
5 mvts /8
|
20480
|
4200
|
|
4 mvts /8
|
4096
|
1680
|
|
4 mvts /8
|
2560
|
1050
|
|
4 mvts /8
|
2560
|
1050
|
|
3 mvts /8
|
512
|
336
|
|
3 mvts /8
|
320
|
210
|
|
3 mvts /8
|
320
|
210
|
|
2 mvts /8
|
64
|
56
|
|
2 mvts /8
|
40
|
35
|
|
2 mvts /8
|
40
|
35
|
|
1 mvt /8
|
8
|
8
|
|
1 mvt /8
|
5
|
5
|
|
1 mvt /8
|
5
|
5
|
|
TOTAL
|
37 448
|
8 800
|
|
|
23 405
|
5 500
|
|
|
23 405
|
5 500
|
|
3 mvts
max
3+2+1
|
584
|
400
|
|
|
365
|
250
|
|
|
365
|
250
|
ANNEXE 2
G COMBINATOIRE DES ETAGES DE COMBAT G
|
Distribution des 3
mouvements dans les �tages de combat :
Rez-de-Chauss�e=0 (jambes)
1er �tage (m�dian ou t�te lat�ral)
2�me �tage (vertical)
|
|
Description du type d'enchainement
|
Etage
|
Valeur energ�tique de
l'encha�nement -
Valeur Incertitude du mouvement
|
|
tr�s
physique
|
0-0-0
|
|
|
|
distance
parade adverse la plus �lev�e
|
x-2-0
|
2< S<4
|
|
|
|
incertitude Haut-Bas
|
2-2-0
|
2
|
9
|
|
|
1-2-0
|
3
|
|
tr�s physique
|
0-2-0
|
4
|
|
distance
parade adverse la plus �lev�e
|
x-0-2
|
2<S<4
|
|
|
|
tr�s physique - lent ?
|
2-0-2
|
4
|
9
|
|
|
1-0-2
|
3
|
|
|
0-0-2
|
2
|
|
|
x-2-1
|
1<S<3
|
|
|
|
2-2-1
|
1
|
6
|
|
|
1-2-1
|
2
|
|
|
0-2-1
|
3
|
|
|
x-0-1
|
1<S<3
|
|
|
|
2-0-1
|
3
|
6
|
|
|
1-0-1
|
2
|
|
|
0-0-1
|
1
|
|
|
x-1-2
|
1<S<2
|
|
|
|
2-1-2
|
2
|
5
|
|
|
1-1-2
|
1
|
|
|
0-1-2
|
2
|
|
|
x-1-0
|
1<S<2
|
|
|
|
2-1-0
|
2
|
5
|
|
|
1-1-0
|
1
|
|
|
0-1-0
|
2
|
|
|
x-2-2
|
0<S<2
|
|
|
|
2-2-2
|
0
|
3
|
|
|
1-2-2
|
1
|
|
|
0-2-2
|
2
|
|
|
x-1-1
|
0<S<1
|
|
|
|
2-1-1
|
1
|
2
|
|
|
1-1-1
|
0
|
|
|
0-1-1
|
1
|
ANNEXE3
&CLES
GRADES DE CANNE DE COMBAT &
EQUIVALENCE DES GRADES DE CANNE
1ere Canne DISPARUE
2�me Canne 1er degr� du Pommeau Bleu
3�me Canne 2�me degr� du Pommeau Bleu
4�me Canne Pommeau Bleu Entier
5�me Canne Pommeau Vert
6�me Canne Pommeau Rouge
7�me Canne Pommeau Blanc
8�me Canne Pommeau Jaune
GRADES DE CANNE ACTUELS
1er degr� du Pommeau Bleu
2�me degr� du Pommeau Bleu
Pommeau Bleu Entier
Pommeau Vert
Pommeau Rouge
Pommeau Blanc
Pommeau Jaune
n
D�j� parus
|
|
LIVRET 1 : GRAVURES
TECHNIQUES �
22 planches - (couverture : fente lat�rale)
Descriptions visuelles des
mouvements de canne de combat
Repr�sentations graphiques de
techniques cannistiques : l�arm� du mouvement et le mouvement d�velopp�.
|
|
|
|

|
LIVRET 2 : LE MANUSCRIT
INTERDIT � _
planches (en cours de r�alisation)
Les coups interdits &
D�tails techniques : voir � La canne de combat dans tous ses
�tats �
|
|
|
|

|
LIVRET 3 : GRAVURES
GEOGRAHICO-PSEUDO-HISTORIQUES � 33
planches
Balade Globe-trotter
|
|
|
|
|

|
LA SAVATE EN BALADE � 7 planches
Pratiquer la savate dans les
plus beaux endroits du monde.
Repr�sentations graphiques de
techniques de boxe fran�aise.
|
|
|
|
|

|
CANNE-CHAUSSON : LES
NOUVEAUX YAMAKASI � 5
planches
Pratiquer la canne-chausson ou
le panache sur les toits du monde.
Repr�sentations graphiques de
techniques de canne- chausson (ou panache).
|
|
|
|